As you may have noticed from the title of this post, this update will not be my typical combat robotics content. I wanted to take this opportunity to provide the readers with a look into my other robotics projects that aren't designed to destroy other robots.
This project came from a class project for one of my graduate classes: "Algorithmic Robotics". The class focuses on algorithmic approaches to problems in the field of robotics. My specific project focuses on the localization of a mobile robot in a controlled environment. For almost any autonomous, mobile robot, localization (knowing where it is located) is a key problem to overcome in order to accomplish the tasks it was designed to do. The classic example of this would be a Roomba that needs to know where it is and where it has been at all times in order to determine if it has covered the entire floor.
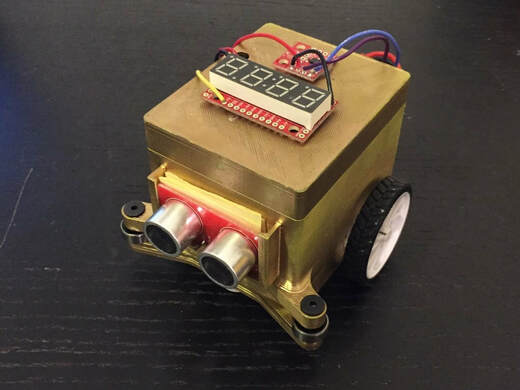
While Roombas cost hundreds of dollars and use very fancy sensors to achieve this goal, I had only one month to complete my project on a graduate student budget, so some simplifications were necessary. I already had an arduino based mobile robot with an ultrasonic sensor from my glove-controlled maze-solving robot, that I wanted to use to save time and money. The ultrasonic sensor would be my main source of information in scanning the environment. Going back to the Roomba corollary, the technology that iRobot uses is LIDAR based, which means it uses a scanning laser that spins in a circle to collect distance measurements in a circle. Because my ultrasonic sensor only senses distance in the direction it is pointing, I would need a way to control my turning when I scanned the environment to be able to control what direction I was attempting to measure. My solution to this was to use a 9-axis IMU (internal measurement unit). This is a single sensor that integrates an accelerometor, magnetometer, and gyrometer into one. For this project, I used the magnetometer (fancy compass) to sense the magnetic north and use it as my reference when turning to be able to make measurements in specific directions. These two sensors were added to the robot in addition to a serial seven segment display that would give visual feedback of the results of the localization algorithm.
This project came from a class project for one of my graduate classes: "Algorithmic Robotics". The class focuses on algorithmic approaches to problems in the field of robotics. My specific project focuses on the localization of a mobile robot in a controlled environment. For almost any autonomous, mobile robot, localization (knowing where it is located) is a key problem to overcome in order to accomplish the tasks it was designed to do. The classic example of this would be a Roomba that needs to know where it is and where it has been at all times in order to determine if it has covered the entire floor.
While Roombas cost hundreds of dollars and use very fancy sensors to achieve this goal, I had only one month to complete my project on a graduate student budget, so some simplifications were necessary. I already had an arduino based mobile robot with an ultrasonic sensor from my glove-controlled maze-solving robot, that I wanted to use to save time and money. The ultrasonic sensor would be my main source of information in scanning the environment. Going back to the Roomba corollary, the technology that iRobot uses is LIDAR based, which means it uses a scanning laser that spins in a circle to collect distance measurements in a circle. Because my ultrasonic sensor only senses distance in the direction it is pointing, I would need a way to control my turning when I scanned the environment to be able to control what direction I was attempting to measure. My solution to this was to use a 9-axis IMU (internal measurement unit). This is a single sensor that integrates an accelerometor, magnetometer, and gyrometer into one. For this project, I used the magnetometer (fancy compass) to sense the magnetic north and use it as my reference when turning to be able to make measurements in specific directions. These two sensors were added to the robot in addition to a serial seven segment display that would give visual feedback of the results of the localization algorithm.
The next step was the approach to be used in order to solve this localization problem. I knew I would want a controlled, relatively open environment so that the algorithm wouldn't have to account for changes in the environment and the ultrasonic sensor would have large, flat obstacles to detect. I settled on using my kitchen as an environment to operate the robot in. This lead to the decision of what approach to use. My kitchen is covered in 12"x12" tiles like many kitchens. These tiles make an excellent physical representation of the discrete locations that the robot could be located in. This lead me to use a histogram filter for the localization algorithm. What this means is that the way the robot locates itself is by scanning its environment and calculating the probable location based on the sensor readings and the map. The probability map is separated into a grid system (similar to the kitchen tiles), with each cell of the grid having its own specific probability. The robot then moves to a new location, re-scans its environment, and updates the probability map accordingly.
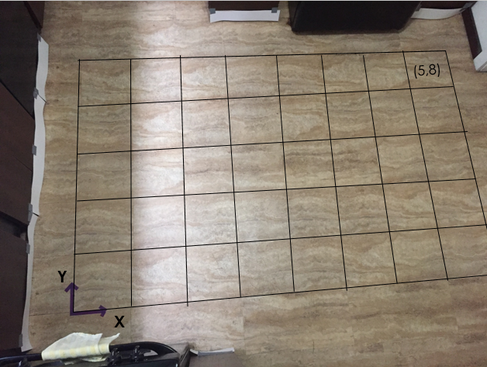
In order to make this happen I had to first get a "map" of my kitchen for the robot to reference. Again to simplify things, this map is simply the distance from each tile to the nearest obstacle in each direction (North, South, East, and West). These directions lined up with the direction of the tiles so that each cell of the map would contain four values that correspond to each expected measurement value. These values were all put into a large multi-dimensional array for comparison.
The next step was to generate the alrogithm. This process started by integrating all of the sensors and motor controllers I had connected to my arduino to make sure that those were all functioning properly before getting into the algorithmic side of the programming. From there it was mainly a process of breaking down the filter process into subfunctions that could each be individually debugged. A diagram of the overall flow of the algorithm can be seen below.
The next step was to generate the alrogithm. This process started by integrating all of the sensors and motor controllers I had connected to my arduino to make sure that those were all functioning properly before getting into the algorithmic side of the programming. From there it was mainly a process of breaking down the filter process into subfunctions that could each be individually debugged. A diagram of the overall flow of the algorithm can be seen below.
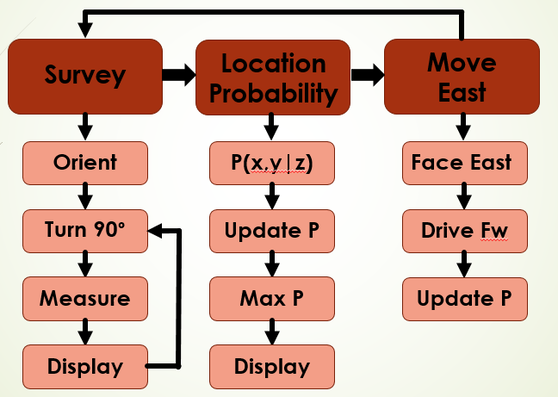
The final video of the result of the project can be seen below. The robot starts by calibrating the IMU and finding where the reading is zero (roughly west). It then turns to its first measurement direction (north) then measures and displays the distance to the nearest object. It repeats this process three times for the three remaining measurement directions. From there, it takes the four measurements that it just collected and compares them to the map. It generates a probability for each cell of the environment (initially a uniform distribution) and then determines the cell with the highest probability and displays the (X,Y) coordinates of that cell on the display. The robot then moves to its new location (one tile east) and repeats the process, continually updating the probability map as it goes.
While this is a simplified version of a much more complex problem, this project is a great proof of concept for the validity of filter based localization. This project shows the complexity required for even some of the simpler robot localization tasks. I hope this post gives readers an appreciation for the amount of effort and thought that goes into the technology that we use everyday.
 RSS Feed
RSS Feed
