As mentioned in the previous post, over the past 10 months I have strayed away from combat robotics in favor of my academics. This doesn't mean I haven't been building things though. I'm in the process of getting my masters in Mechanical Engineering with a focus in Robotics, so I've had some opportunities to learn the more civil side of robotics. I wanted to give a quick overview of what projects I've been involved in to show some of my readers what you can do to apply your interests in combat robotics to a more academic and industrial setting.
Visual Communication
Part of being a graduate student is that my class schedule is a little more open, meaning I am free to take other classes outside of my core major. Last semester I had the opportunity to take a class taught by a professor from the Cleveland Institute of Art on Basic Visual Communications for Engineers. This was a class to teach us how to create "concept drawing" style art. This was a great opportunity for me as engineering design has always been the field I've been interested in pursuing in my professional career.
Below are some pictures from our final project. We were tasked with a designing a product that fit within our major. Being a mechanical engineer, I had a lot of options to explore. I decided to combine my two passions: Engineering and Ultimate Frisbee, to come up with the design below. A key part of the sport of ultimate frisbee is the ability to catch the disc as high as possible, similar to someone in basketball going up for a rebound. In order to practice this, I designed a device that holds the disc for the user at an adjustable height so that they can practice reaching their maximum height. I came up with 3 different designs for this product, choosing one to be my final version that was colored and presented to the class.
Below are some pictures from our final project. We were tasked with a designing a product that fit within our major. Being a mechanical engineer, I had a lot of options to explore. I decided to combine my two passions: Engineering and Ultimate Frisbee, to come up with the design below. A key part of the sport of ultimate frisbee is the ability to catch the disc as high as possible, similar to someone in basketball going up for a rebound. In order to practice this, I designed a device that holds the disc for the user at an adjustable height so that they can practice reaching their maximum height. I came up with 3 different designs for this product, choosing one to be my final version that was colored and presented to the class.
Lower Body Exoskeleton
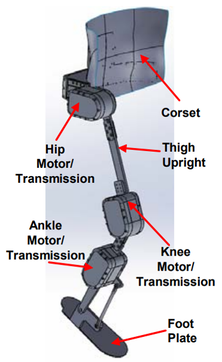 | For my thesis research, I am part of a team developing an exoskeleton to help those with lower spinal cord injuries be able to walk again. This system actuated the major lower body joints (hips, knees, and ankles) based off of the firing of intact motor neurons in the user. Each of the joints has an actuator that meets the speed, torque, and range of motion requirements for each joint based on the physical needs of the human body. This is where my project focuses. I have been tasked with redesigning the actuators of the previous version of the exoskeleton to be more mechanically efficient, cheaper, lighter, and smaller while providing equal joint speed, torque, and range of motion of the previous version. |
Each actuator comprised of four major components: a DC electric motor that powered the motion of the actuator, an electronic solenoid style brake that provided braking of the joint in the event of an electrical failure for the safety of the user, a transmission system to reduce the speed of the motor and increase the torque to a usable level, and a feedback system to provide information of the actuator to the control system of the exoskeleton.
In order to decrease the overall cost and mechanical efficiency, the biggest change from the previous version of the actuators would be to replace the harmonic drives that were being used as a transmission with a custom planetary gearbox. This would drastically increase the efficiency as the harmonic drives decrease exponentially in efficiency with an increase in speed.
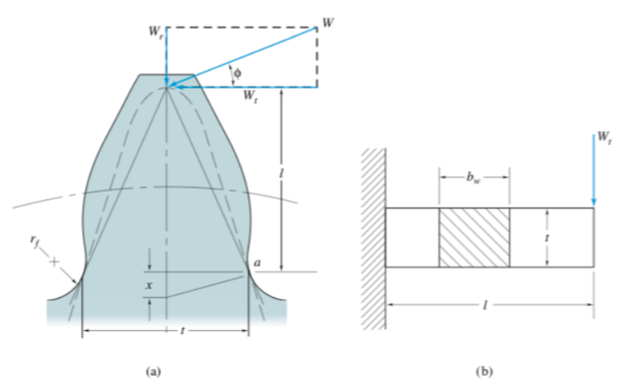
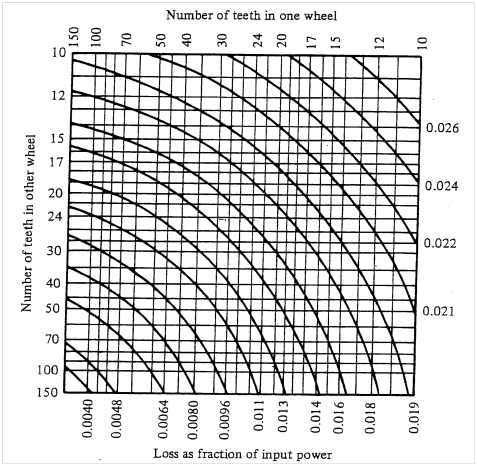
The design of this actuator began with the design of the planetary gearbox. I won't go too much into the detail of the design here, but the motor values and desired output values were known. So it was just a matter of designing a gearbox at the proper ratio that matched those two sets of values. Off the shelf components were selected for minimum custom machining. These gears were theoretically evaluated to make sure that they would hold up to the expected loads with an appropriate factor of safety using the Lewis gear calculations (left). Once the entire system would withstand the expected loads, the overall efficiency of the gearbox was evaluated based off of spur gear interaction efficiencies (right) to ensure the efficiency was greater than the harmonic drives previously being used. The predicted efficiency of the final design came out to be over 95% efficient which is a drastic improvement from the ~60% efficiency of the harmonic drives.
In order to decrease the overall cost and mechanical efficiency, the biggest change from the previous version of the actuators would be to replace the harmonic drives that were being used as a transmission with a custom planetary gearbox. This would drastically increase the efficiency as the harmonic drives decrease exponentially in efficiency with an increase in speed.
The design of this actuator began with the design of the planetary gearbox. I won't go too much into the detail of the design here, but the motor values and desired output values were known. So it was just a matter of designing a gearbox at the proper ratio that matched those two sets of values. Off the shelf components were selected for minimum custom machining. These gears were theoretically evaluated to make sure that they would hold up to the expected loads with an appropriate factor of safety using the Lewis gear calculations (left). Once the entire system would withstand the expected loads, the overall efficiency of the gearbox was evaluated based off of spur gear interaction efficiencies (right) to ensure the efficiency was greater than the harmonic drives previously being used. The predicted efficiency of the final design came out to be over 95% efficient which is a drastic improvement from the ~60% efficiency of the harmonic drives.
 |  |
After the internal components were selected, they were modeled using Onshape online CAD software. In addition to the actuating components, a potentiometer and torque sensor were integrated into the system to be able to provide force and position feedback to the controls system. The aluminum housings were designed around this system to make the system physically possible to be assembled while minimizing overall size and weight of the actuator. The final CAD models of the actuator can be seen below.
Glove-Controlled Maze-Solving Robot
As part of a different graduate class, we were tasked with designing and building a glove that controlled a robot that would solve a 5" wide maze. This was done as an example of alternative controls schemes for people who may not be able to use classical controls such as buttons or touchscreens (e.g. small children or people with disabilities). This was done as a part of my professors exploration into flexible robotics.
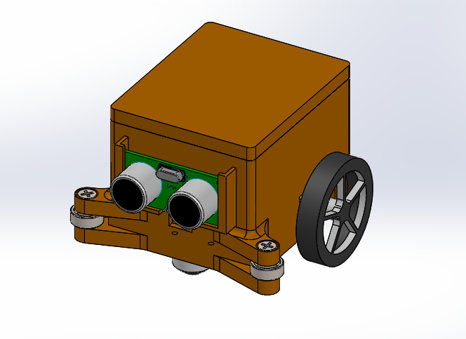
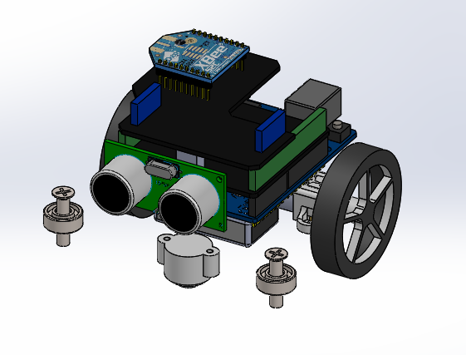
My partner and I decided on a simplistic yet robust approach to this design problem. We wanted to finish the building and programming part as quickly as possible in order to test and trouble shoot the design. We settled on a glove that had an accelerometer on it that was connected to an arduino lilypad that calculated the tilt of the glove and sent that information to the robot via XBee communication. The robot processed this information and turned it into directions such as forwards/backward, left/right. Each command had a set of stepped ranges that allowed for more consistent control as all of the turns in the maze were 90 degrees and fine maneuverability was less important than tracking straight in the maze. In addition to the glove control, we integrated an ultrasonic sensor into the robot to detect walls and automatically stop so that we could tell it to turn left or right in the maze itself. Below are a couple images of the CAD renderings I did of the robot before buiding
My partner and I decided on a simplistic yet robust approach to this design problem. We wanted to finish the building and programming part as quickly as possible in order to test and trouble shoot the design. We settled on a glove that had an accelerometer on it that was connected to an arduino lilypad that calculated the tilt of the glove and sent that information to the robot via XBee communication. The robot processed this information and turned it into directions such as forwards/backward, left/right. Each command had a set of stepped ranges that allowed for more consistent control as all of the turns in the maze were 90 degrees and fine maneuverability was less important than tracking straight in the maze. In addition to the glove control, we integrated an ultrasonic sensor into the robot to detect walls and automatically stop so that we could tell it to turn left or right in the maze itself. Below are a couple images of the CAD renderings I did of the robot before buiding
 |  |
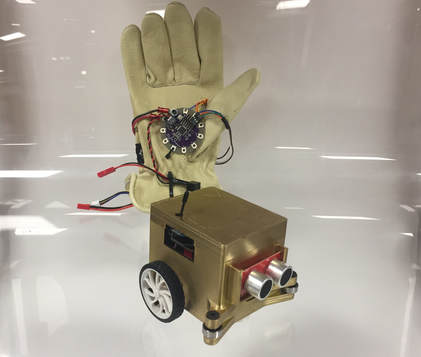
The robot was 3D printed and painted gold for looks. The competition was a tournament style, with one play in round where the top four teams advanced to a two round head to head finale. Our robot came out on top, finishing the maze in 1:18. It won both its head to heads to win the tournament and take home first prize. The final version of the robot along with the glove can be seen below. I've included videos of the first two rounds of competition. Unfortunately in the excitement I didn't get a video of the finals.
I really enjoyed this project as it was my first real hands on experience with arduino programming from the ground up. It was nice to finally build something that didn't get smashed to pieces. But as you'll see in the video, we couldn't help but smash into each other in the finals.
I really enjoyed this project as it was my first real hands on experience with arduino programming from the ground up. It was nice to finally build something that didn't get smashed to pieces. But as you'll see in the video, we couldn't help but smash into each other in the finals.
 RSS Feed
RSS Feed
