Motorama 2019 was a bit of a disappointment for me. As I'll go into in detail below, I lost a lot of matches for simple things that I easily could have fixed, or on close judges decisions. Overall Team ConnBots ended up 5-6 on the weekend. This was the first time in a long time I had lost more matches in a weekend than I had won. Luckily though, the robots came out mostly unscathed so I can simply fix some of the small failures I had and be ready for the next event I go to. As with my previous updates, I will update this post with videos of the fights as they come out.
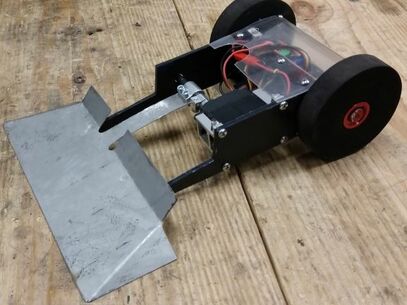
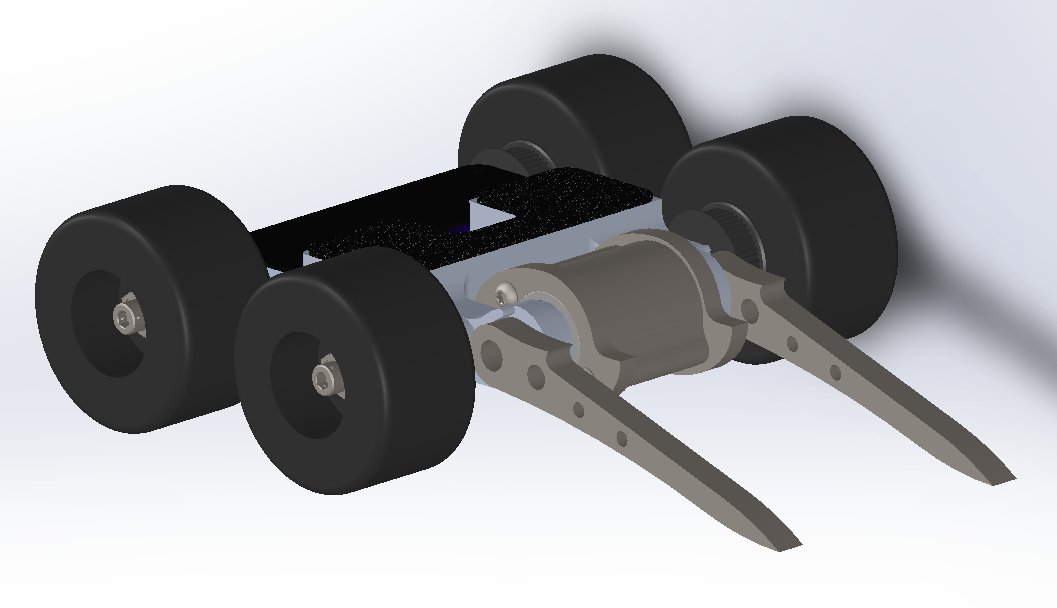
Hercules (2-2)
The updated version of Hercules worked better than the previous versions, but it still had issues. The new grabber worked great, but even with the magnet on holding the back end down, I was unable to drive my opponents around. This could have either been a result of my under-powered drive motors stalling out when the combined weight of the two robots and the magnetic downforce were loading them or the wheels sliding on the incredibly dirty floor in the arena. I will have to do further testing to determine the root cause.
Pan Handler
Pan Handler was a full body lifter built out of a dollar store dustpan. This was a really creative design. I love creative and different robots. Fortunately for me though, the plastic dustpan did not ride closely to the ground and I was able to get underneath him and push him around a lot, although I was never able to lift him due to the large, unique shape. This didn't matter as he couldn't lift me either. Hercules won on a judges decision.

Speed Wedge 1
Speed Wedge 1 was a 4WD wedge. It was having some driving issues and was significantly slower and less powerful than it should have been. This allowed me to get around and lift it multiple times. Although, as stated before, I was unable to drive around with the robot lifted in the air as I wanted. This still made for a good showing for the judges and was enough to get the decision to move on to the next round.
Ratfish
Ratfish is a very powerful servo flipper robot. I was pretty excited about this match as we have similar designs and it would be a good driving match against a veteran builder. Unfortunately when I turned Hercules on, the servo was not working and due to the tournament layout, I could not postpone our fight. This meant Hercules was basically just a floppy wedge bot. Since I couldn't articulate the wedge, there were several times where we ended up going head to head and he flipped me by going over the lifter plate, but under my side stabilizing forks, causing me to be tossed. I also could not adjust the claw when upside down, leading to me hobbling around the arena, upsidedown for most of the fight, waiting to be flipped back. Hercules lost easily on a judges decision.
Fire Arrow
Fire Arrow is another 4WD wedge bot that is well driven. I knew I would have to drive well in order to win this fight. There was a lot of back and forth grappling and pushing. I couldn't really get that good of a hold on him because he was mostly spinning wheels. In the end, the judges came to a split decision for Fire Arrow that I questioned, but the judges decision is final. And thus begin my hatred of Wedges for 2019.

In the end, I was relatively happy with how Hercules performed. I would have liked to have it working better but that mostly came down to time and practice before the event. Neither of which I had a lot of. While it had a relatively disappointing record on the weekend, It didn't face a single spinner weapon and is basically brand new still. I am hoping to find a local event in the near future to bring it to that I can continue to work out some of the issues I had.
El Tigre (3-2)
Go Up
Go Up was a 4WD vertical spinner from WPI robotics club. This was a well designed bot, but had a very tough match up in El Tigre. El Tigre ended up destroying the mild steel feeder forks and barely taking a single hit the entire fight. Tossing around Go Up for most of the fight, winning on an easy judges decision
Scrambler
Scrambler was a Kinetic Kit robot, very similar in style to El Tigre. While this is a proven design, I simply out drove them for most of the match. I got to their sides, knocking them around and eventually forcing them to tap out when their wheel hubs fell off and they were unable to move.
Weta
Weta is the original Kitbots vertical drum spinner. I was really looking forward to this matchup as it is a well experienced driver and bot. Unfortunately for them, Weta stopped moving second into our fight, without even making it fully across the arena. El Tigre won by knockout without even touching the other bot.
Nautiloid
Nautiloid was a vertical disc spinner from Georgia Tech. I knew this would be a tough matchup for me as I coudn't really go weapon to weapon with him and would have to out maneuver him. Unfortunately, the weapon on El Tigre stopped working after the first hit. I later found out the set screw that held the weapon motor pulley on was completely missing, probably before the match even started. This lead to me trying to push him around for most of the fight. While El Tigre did well at this, the rather destroyed floor made it difficult and lead to him getting a few good hits in that swayed the judges giving El Tigre its first loss.

Mondo Bizzaro
Mondo Bizzaro is a Kitbot drum spinner. While it looked the same as Weta, I knew this fight wouldn't be as easy. El Tigre was winning most of the match. It won a couple of weapon to weapon hits and jammed Mondo's weapon for most of the fight. When it became unstuck, he got a lucky hit that snapped my weapon belt. Turning the tide of the fight. I though I still had a good chance to win up until the last few seconds when I got stuck on my side after a big hit. El Tigre was counted out for its second loss of the tournament.

El Tigre was the one bright spot in a rather dissapointing weekend. The only robot I had that had a winning record and with its only two losses coming to the eventual 2nd and 3rd place bots. Both of which could have been easily avoided with some minor revisions. That being said, I think it is time to retire El Tigre. I am at the point at which three bots is too many for me to handle alone at an event and I would need to reinvest some serious money and time to remake El Tigre to where I'd want it to be. I will likely be selling it in order to help pay for future bots and allow the usable parts to not go to waste.
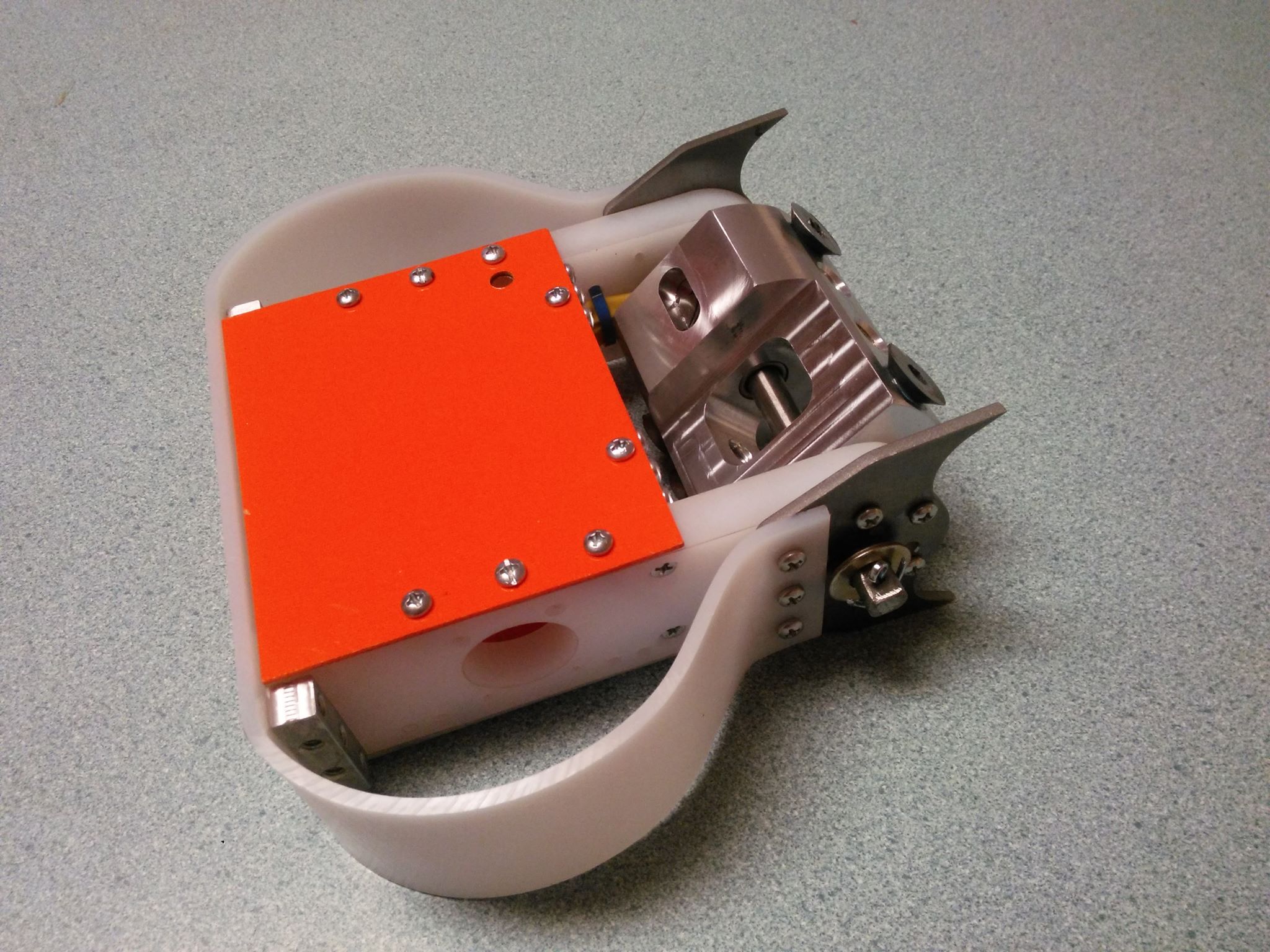
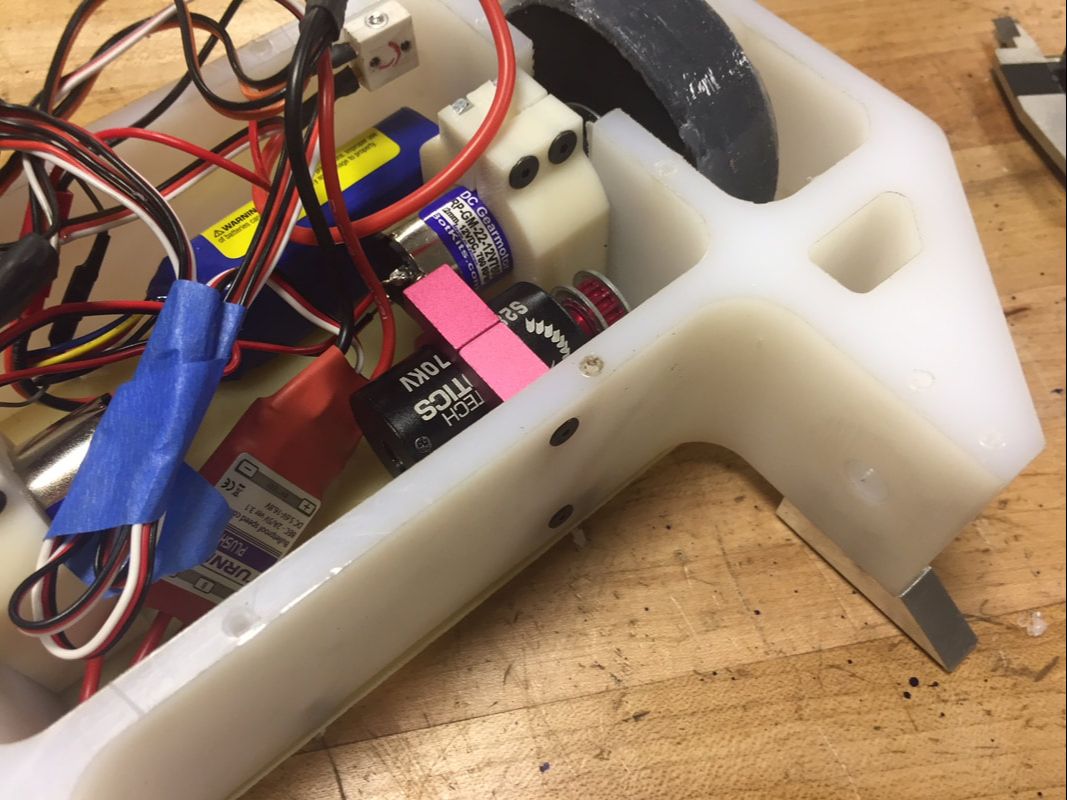
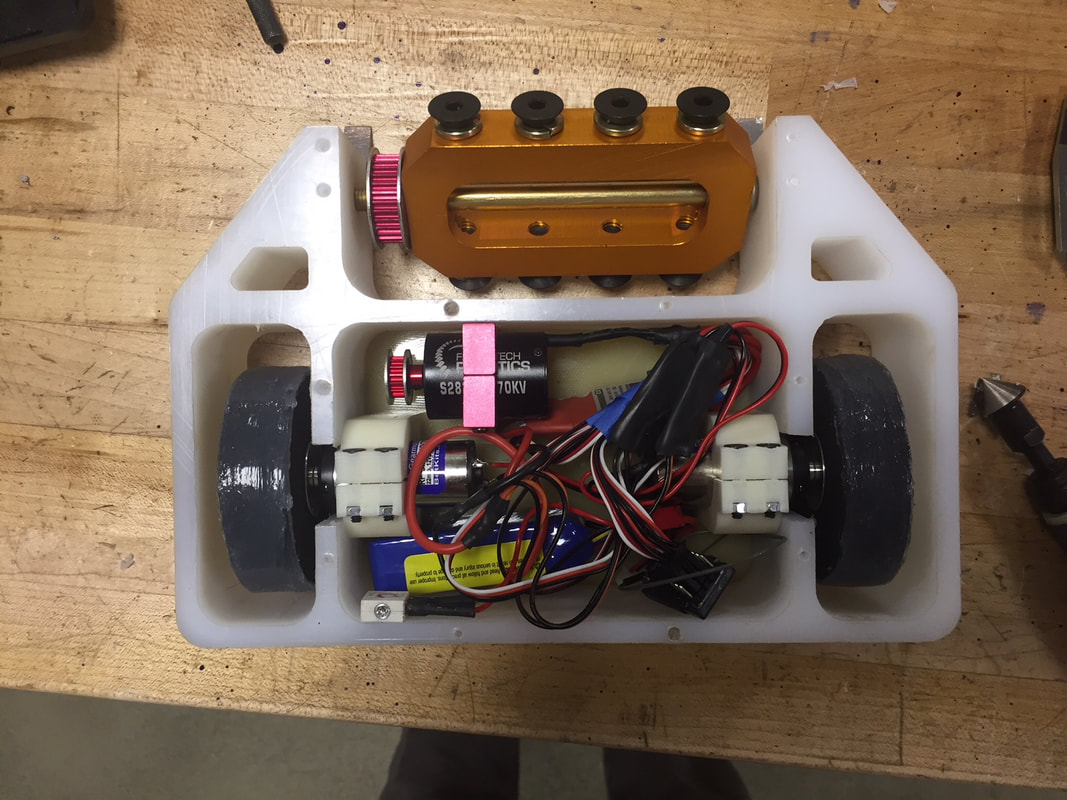
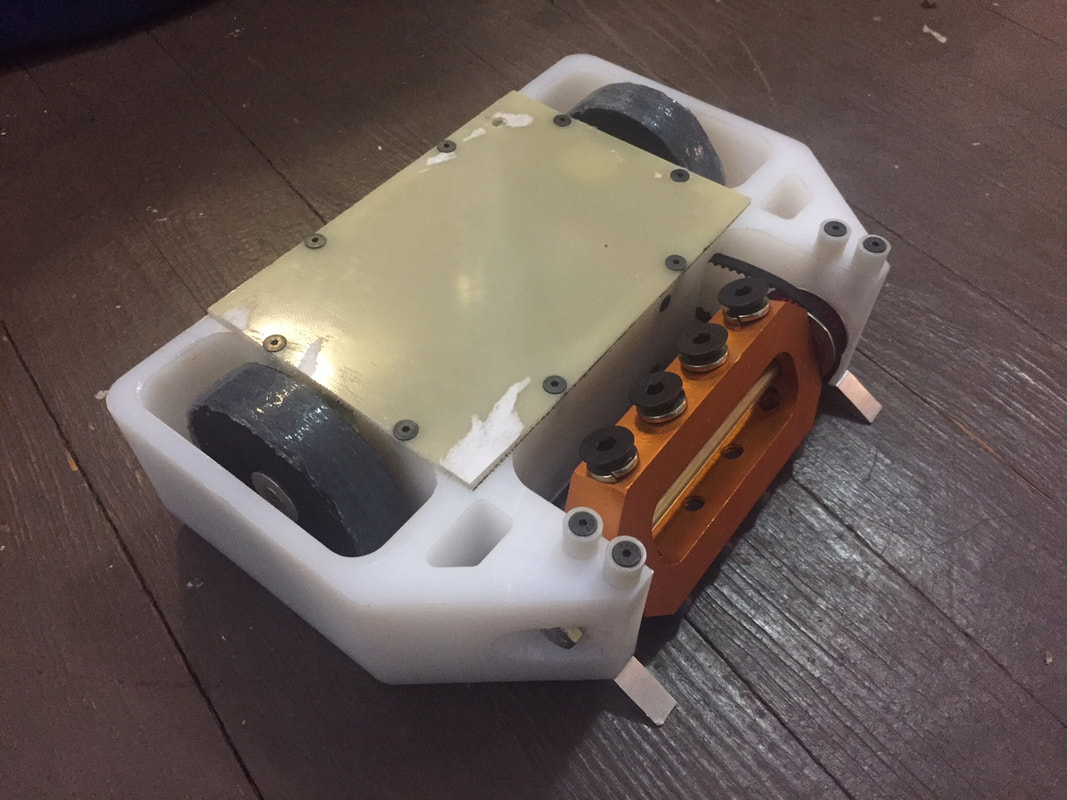
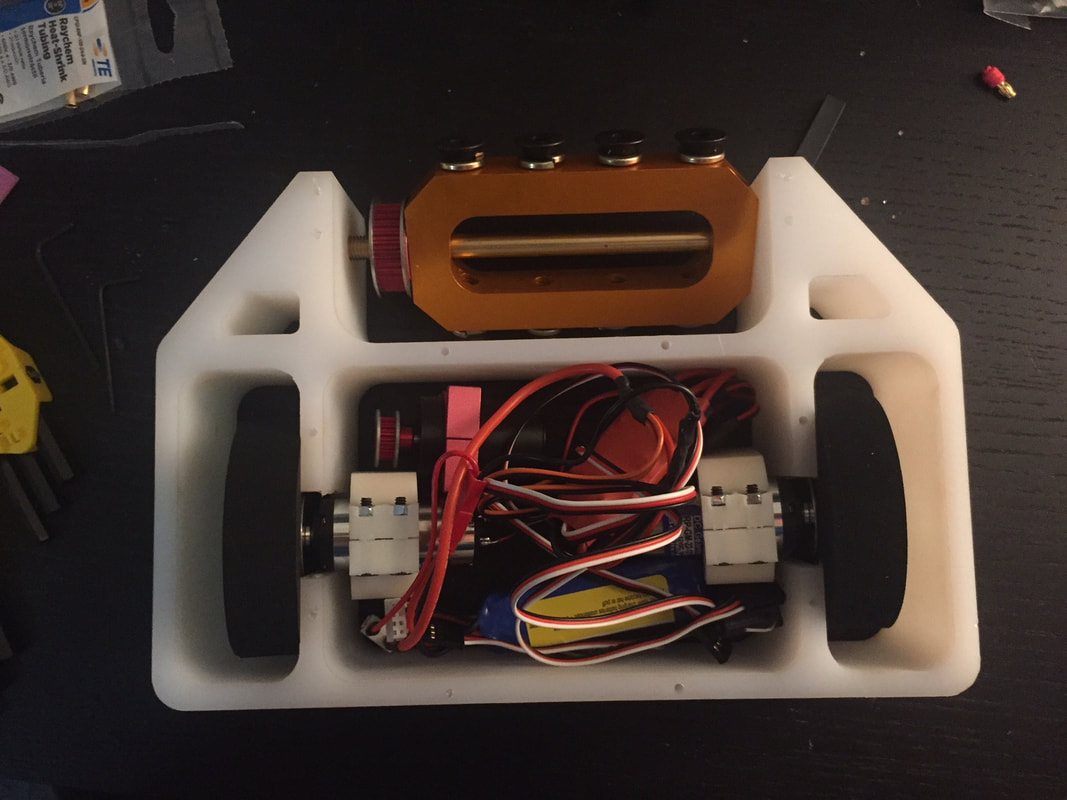
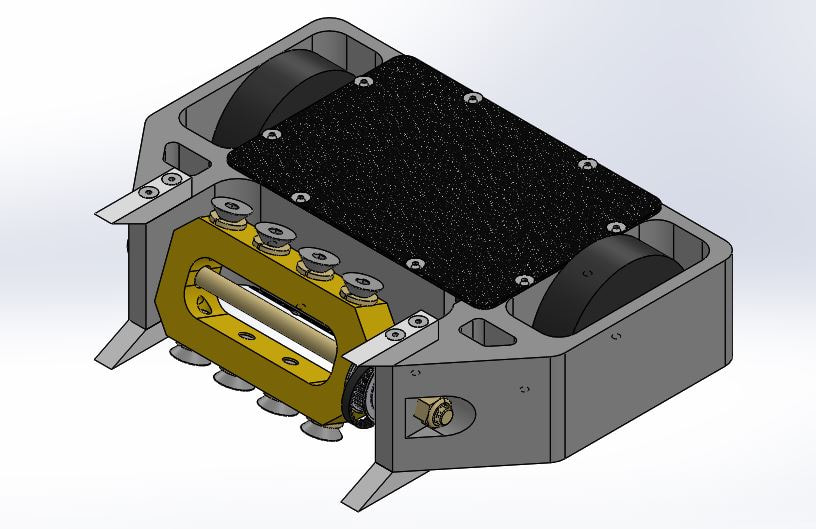
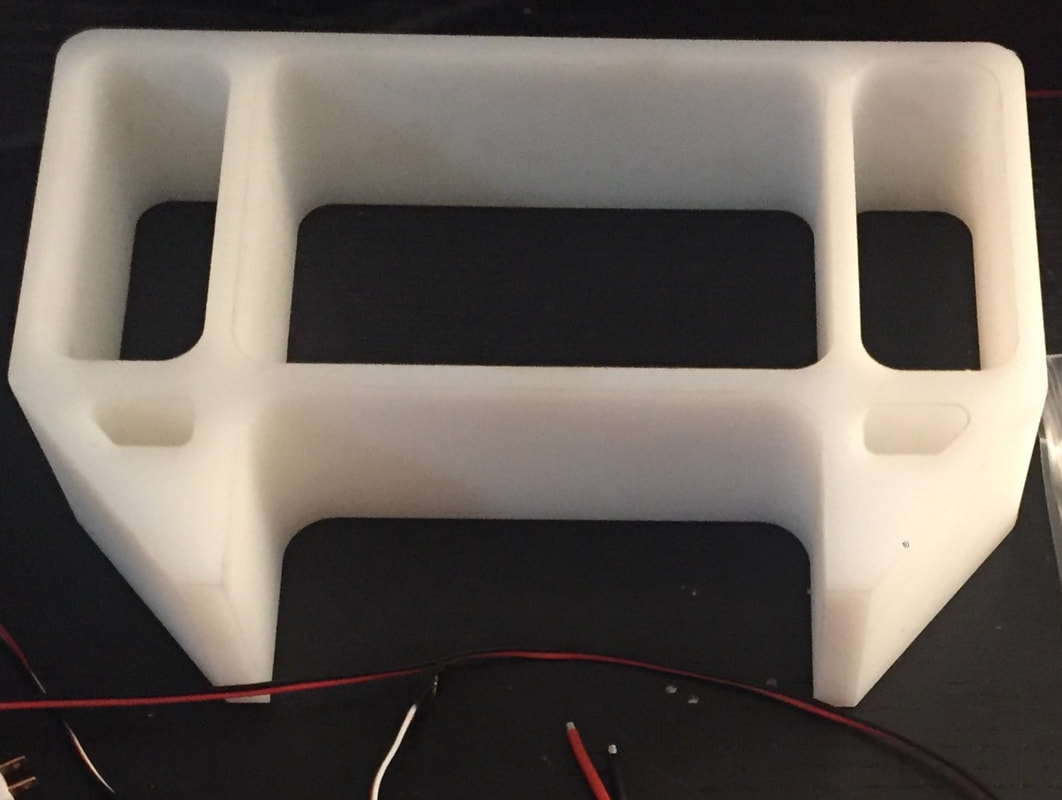
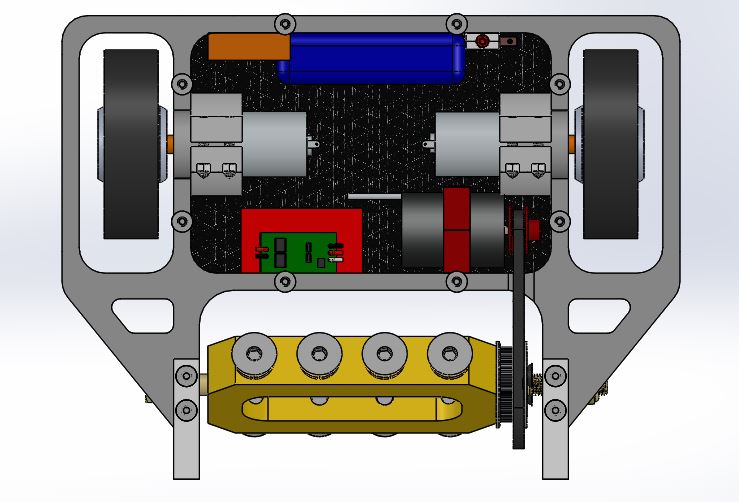
Butcher (0-2)
Butcher was by far the most dissapointing robot of the weekend. While most of the changes I made were relatively minimal, they were untested leading to two quick and aggravating losses for a robot that placed 4th at the same tournament last year. Most of this came down to luck of the draw of the tournament and a tough judges decision, but again, as with Hercules, it came out unscathed and will be able to fight again soon with few revisions.
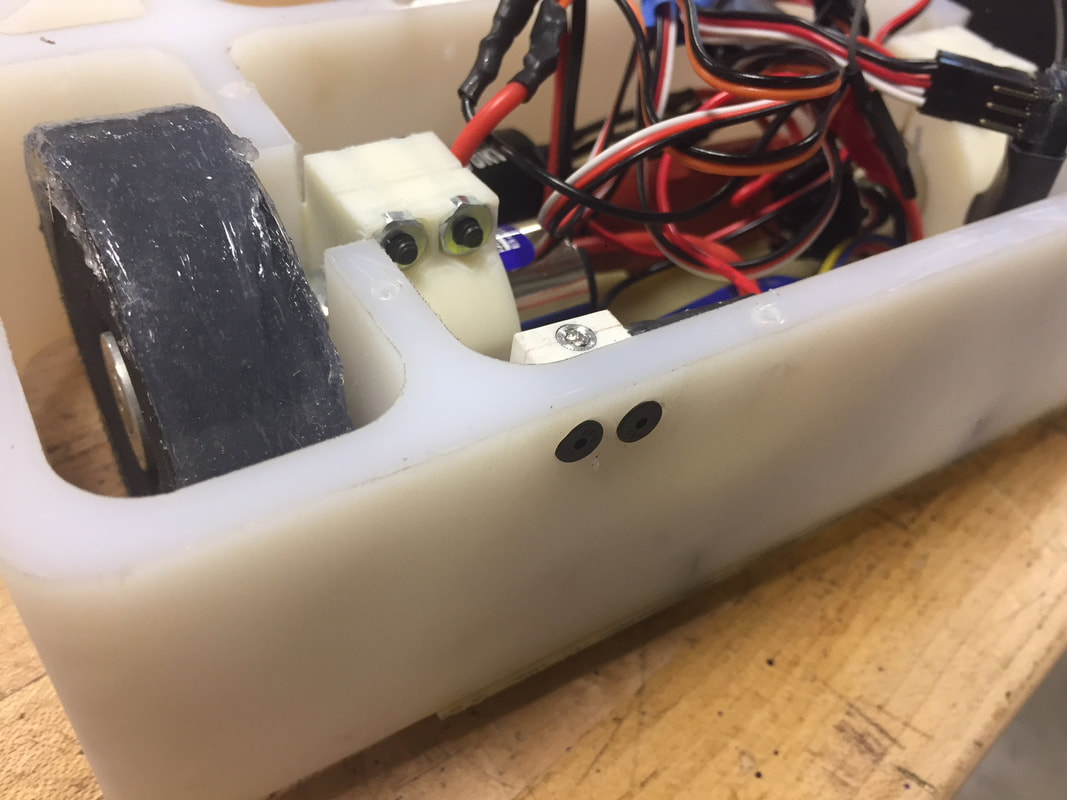
Eulogy
Eulogy was a last second wedge that weighed in at only 7lbs. I severely underestimated it though as its relatively light weight gave it tons of driving power. I got one good hit in before he slammed me into the wall and I threw myself into the air causing my battery to come unplugged and knkocking me out for the loss. The extra room I added to the interior of Butcher for this year allowed enough room for the battery to shift and unplug itself on a big hit. While dissapointing, this was a simple fix. I was still confident as this is exactly how I worked my way back to a 4th place spot last year after losing my first match.
Splayed
Splayed was a solid 4WD wedge. I was pretty upset with how the tournament bracket fell out as this was the worst possible matchup for me at this point. I knew I would have to take out their wheels without breaking my own weapon belt in the process. Thankfully, this time the batter stayed connected through a few huge hits. But eventually the weapon belt came off and I was forced to try and push my way out. Eventually one of the brushless drive motors gave out and we were both wriggling around the arena without doing much to eachother. I lost on a judges decision that, while fair, stung because I had done all of the damage to myself and thought I had fixed these issues already.
While this weekend was very frustrating for Butcher, I plan to do some minor tune ups and compete with it in another competition this year, wherever my job hunt lands me. Butcher took very little damage, only scraping some of the paint off of the weapon disk and blowing a drive motor. These are easily fixed and it will be ready to go in the future.





 RSS Feed
RSS Feed
