I took advantage of the long, holiday weekend to make some very much needed upgrades to the Butcher. Winning only 1 fight at November Necrosis and having both losses be a result of poor design choices rather than actual in fight damage pushed me to give the bot a well deserved redesign.
From my previous post, there were a few things I wanted to keep in the design. I've been loving how well the layered, through bolted UHMW has been working for this bot. Still relatively cheap and easy to make, tanks big hits, and is light enough for the large body needed for a horizontal spinner. I also really liked the weight distribution in its previous event. It was much more drivable than its previous iterations.
There were still a lot of down sides though, mainly related to reliability. The drive system itself needed some work to prevent the brushless motors from braking themselves, either by impact, or by loosening from the pinion gear. The weapon system also needed some work. Before it's last competition, I had worked on increasing the reliability of the weapon stack itself, but that meant that there was more stress on the weapon motor, leading to the pulley shearing off the motor, leaving the weapon useless.
From my previous post, there were a few things I wanted to keep in the design. I've been loving how well the layered, through bolted UHMW has been working for this bot. Still relatively cheap and easy to make, tanks big hits, and is light enough for the large body needed for a horizontal spinner. I also really liked the weight distribution in its previous event. It was much more drivable than its previous iterations.
There were still a lot of down sides though, mainly related to reliability. The drive system itself needed some work to prevent the brushless motors from braking themselves, either by impact, or by loosening from the pinion gear. The weapon system also needed some work. Before it's last competition, I had worked on increasing the reliability of the weapon stack itself, but that meant that there was more stress on the weapon motor, leading to the pulley shearing off the motor, leaving the weapon useless.
Drive Train Upgrades
The old drive system was sort of hobbled along through the iterations of the bot. The initial design had brushed DC motors that were heavy and underpowered, though reliable. I tried to use some drop in replacements that were smaller, 1100 kV inrunners because I needed to save weight because the old weapon disc was 4 lbs and I didn't want to deal with outrunners.
Because I was remaking almost every part of the bot, I decided to re-approach the drive system. I decided to go with the well established SK3 3536 outrunner paired to a Banebots P61 16:1 gearbox. This should be slightly slower than my previous drive combination, but have more low end torque and be more driveable in general.
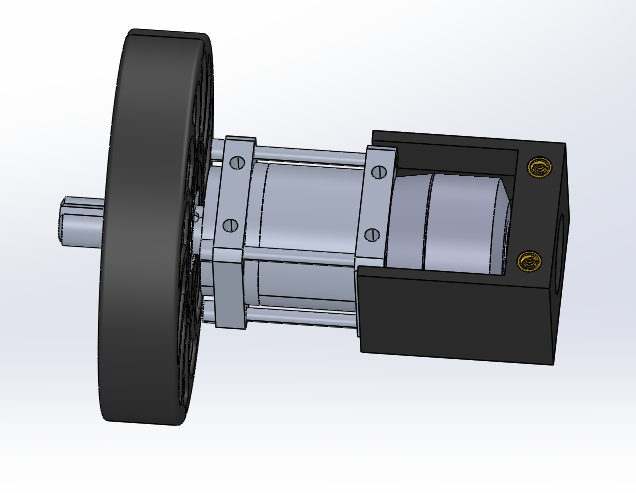
With this new motor being an outrunner, I knew I needed to protect the spinning can from the wires on the inside of the bot. I took that need and combined it with my desire to better support the rear of the motor to prevent the relatively small face mounting screws from ripping themselves out during impacts. I created a 3D printed bearing block that supports the end of the motor while simultaneously shielding the spinning can of the motor from the rest of the electronics.
I decided to keep the 4" Banebots compliant wheels as they seem to work really well in this design and give me a little extra ground clearance that the bot definitely needs. With some left over weight from the re-design, I added another 3D printed bearing block to help support the end of the drive wheel shaft to make the system even more bulletproof.
With this new motor being an outrunner, I knew I needed to protect the spinning can from the wires on the inside of the bot. I took that need and combined it with my desire to better support the rear of the motor to prevent the relatively small face mounting screws from ripping themselves out during impacts. I created a 3D printed bearing block that supports the end of the motor while simultaneously shielding the spinning can of the motor from the rest of the electronics.
I decided to keep the 4" Banebots compliant wheels as they seem to work really well in this design and give me a little extra ground clearance that the bot definitely needs. With some left over weight from the re-design, I added another 3D printed bearing block to help support the end of the drive wheel shaft to make the system even more bulletproof.
Weapon Upgrades
The main problem crippling the weapon system up until this point has been the attachment of the weapon motor to the drive pulley for the weapon. The original design had it just press fit on, but because I was young and didn't know how to machine things to tolerance, the plastic began to slip and fail over time, loosening the fit, causing weapon issues. I later moved to a custom aluminum pulley that had small set screws in there to help keep it attached to the can of the motor. Those did basically nothing besides chew up my belts though.
The core problem is that when the weapon hits something, that change in velocity in the form of a big impulse gets transferred back through the weapon belt to slow down the motor. With a properly tensioned belt, there is only a small amount of slip when this happens, but some of the energy is transferred to the drive pulley, to the weapon motor through whatever is joining the two. This is roughly equivalent to using the weapon pulley as a hubmotor and hitting things with the pulley. The joint between the pulley and the motor has to be able to endure these shock loads.
The core problem is that when the weapon hits something, that change in velocity in the form of a big impulse gets transferred back through the weapon belt to slow down the motor. With a properly tensioned belt, there is only a small amount of slip when this happens, but some of the energy is transferred to the drive pulley, to the weapon motor through whatever is joining the two. This is roughly equivalent to using the weapon pulley as a hubmotor and hitting things with the pulley. The joint between the pulley and the motor has to be able to endure these shock loads.
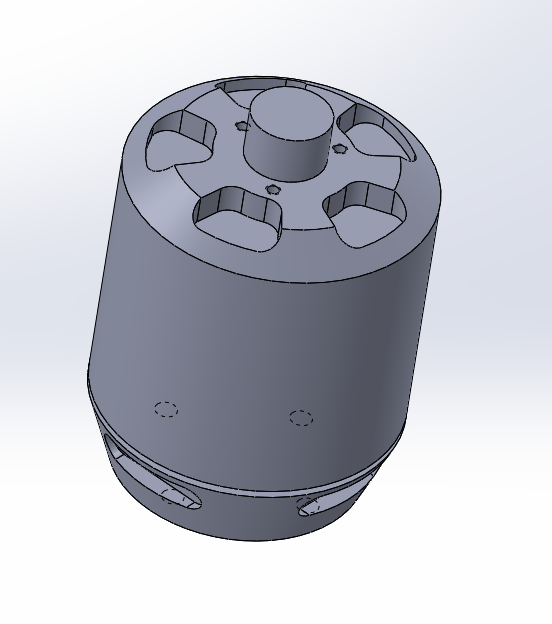 |  |
To better understand what I was trying to do, I spent some quality time with my calipers to create an accurate model of my weapon motor. The motor pictures is actually the Turnigy Aerodrive 4250-500 when the motor I currently have is the 4240 version. Assuming it's the same thing, just 10 mm longer, I decided to design around the larger motor as I had some extra weight and space for the larger motor and it was over 1.5 times more powerful than the motor I've had in the bot up until now.
Looking at the motor, there isn't a lot for a large diameter pulley to grab onto. Traditionally, these motors are designed for airplanes, so the propeller of the plane would be mounted to the motor shaft through a prop adapter that clamps onto the 5mm shaft. This won't work in this application as the motor itself is almost the entire height of the robot. The can is smooth and relatively hard. Only the top of the motor bell has any features that could be used to lock a pulley onto the motor. There are 3 tiny M2 screws around where the rotor attached to the main shaft. Again these are designed for ultralight propellors to attach to the motor, not the shock loads of combat robotics.
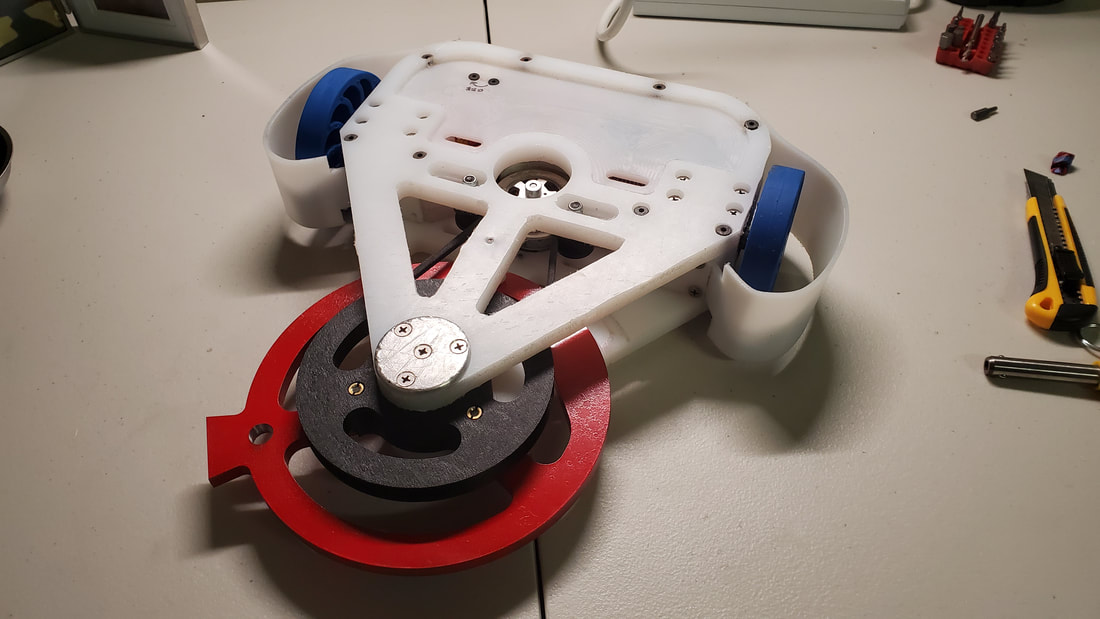
My decision was to design a custom part to be machined out of aluminum if it isn't crazy expensive to make. The part would slip over the end of the motor, locking into place with positive features that matched the recesses in the end of the rotor, and held in place with the M2 screws. This way the shock loads should transfer through the bosses on the underside of the pulley to the motor can, leaving the M2 scews to only handle tensile loads trying pop the pulley off of the motor. In theory at least. I plan to have this test printed at least once before I try and place an order for a real machined part.
Looking at the motor, there isn't a lot for a large diameter pulley to grab onto. Traditionally, these motors are designed for airplanes, so the propeller of the plane would be mounted to the motor shaft through a prop adapter that clamps onto the 5mm shaft. This won't work in this application as the motor itself is almost the entire height of the robot. The can is smooth and relatively hard. Only the top of the motor bell has any features that could be used to lock a pulley onto the motor. There are 3 tiny M2 screws around where the rotor attached to the main shaft. Again these are designed for ultralight propellors to attach to the motor, not the shock loads of combat robotics.
My decision was to design a custom part to be machined out of aluminum if it isn't crazy expensive to make. The part would slip over the end of the motor, locking into place with positive features that matched the recesses in the end of the rotor, and held in place with the M2 screws. This way the shock loads should transfer through the bosses on the underside of the pulley to the motor can, leaving the M2 scews to only handle tensile loads trying pop the pulley off of the motor. In theory at least. I plan to have this test printed at least once before I try and place an order for a real machined part.
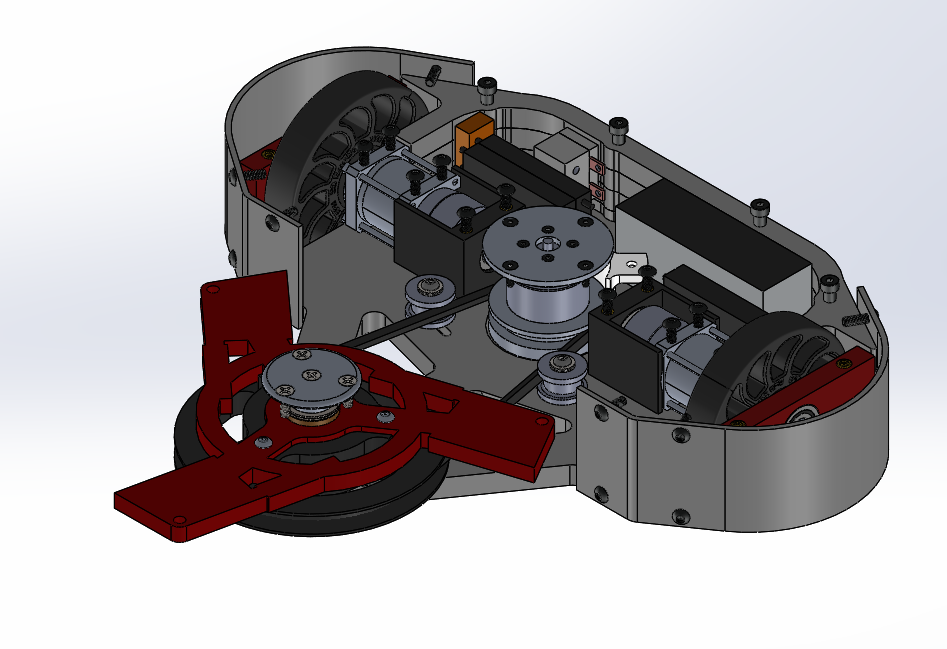
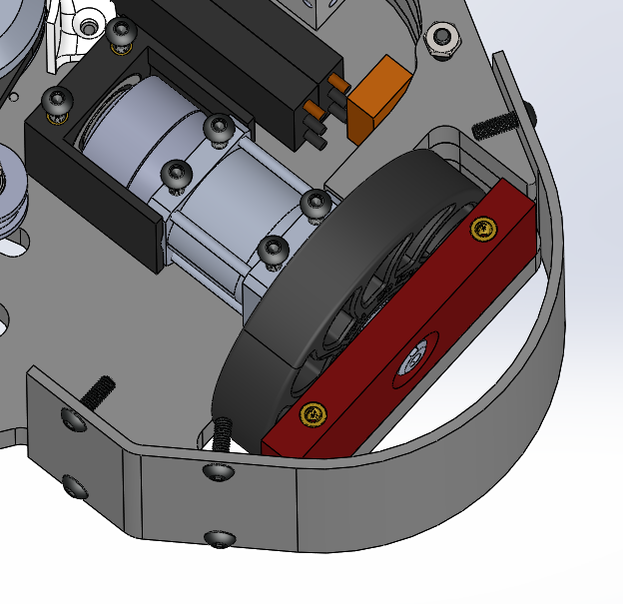
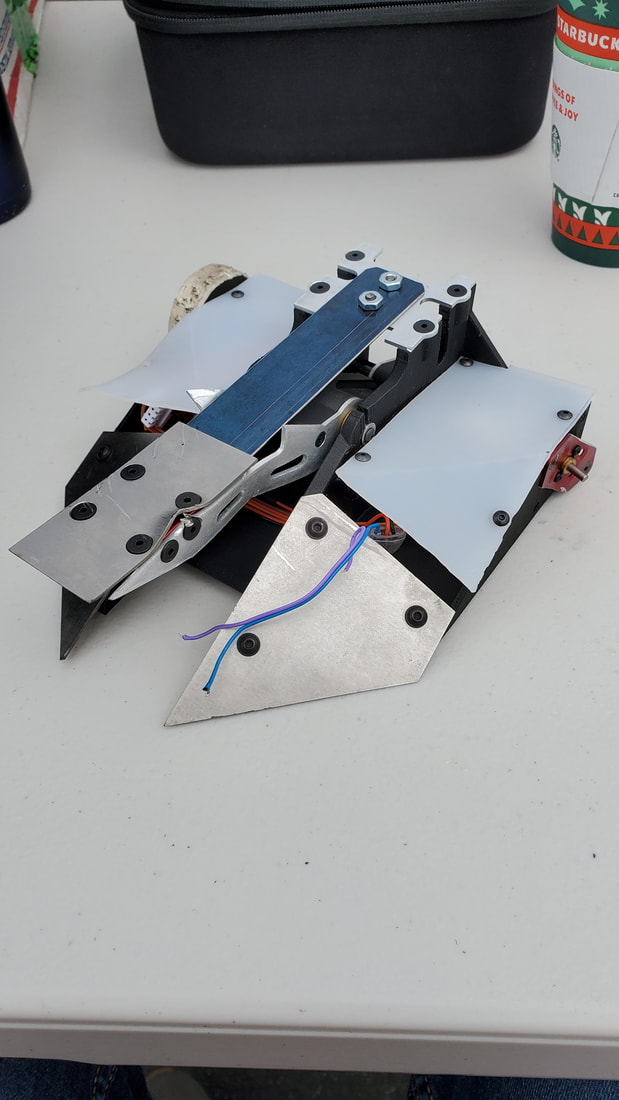
In the picture above, you can see the bottom view of the robot, with the bottom frame piece hidden. This shows hoe the weapon motor is mounted as well as the new pulley. As part of these changes, I also moved the weapon motor back to be able to better place the tension idlers where they wont get hit by the blade, but have enough travel to properly tension the belt.
With the new weapon motor upgrades, the weapon only has a theoretical top speed of around 4,500 RPM, which is relatively low compared to some spinners in the field. The hope is to have a much faster spin up time as most arenas for 12 lb bots are relatively small given the speeds at which these things move. This will hopefully let me land more consistent hits and stay spinning the whole match. Top speed is less important for this right now as the weapon is still over 3 lbs and almost 10" effective diameter, should still hit hard, even at lower speeds. I've never successfully made it to "top speed" with this bot anyway as the weapon system has been plagued with issues it's whole career.
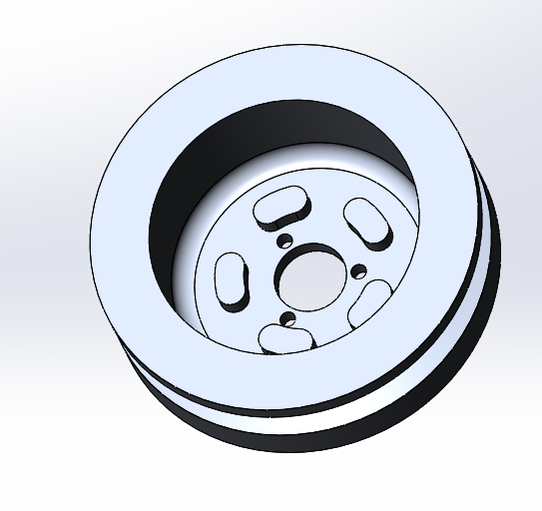
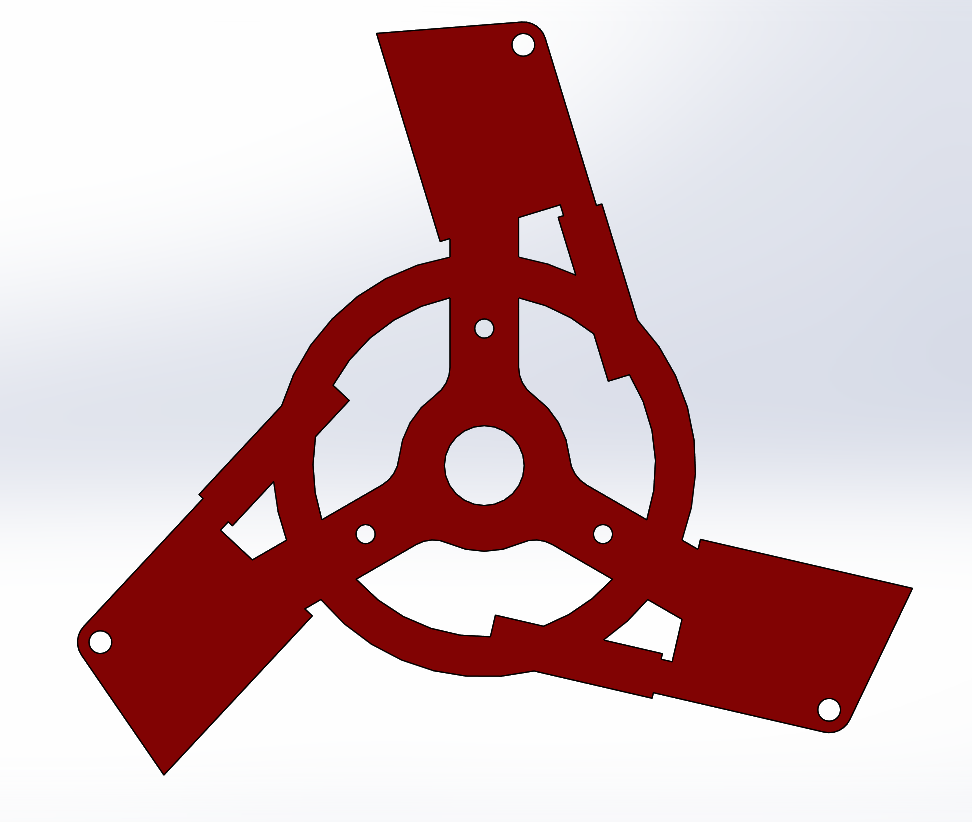
Given this lower top speed I wanted to try and design a disk with more teeth for when I fight wedged opponents and am not going for the knockout hit, but rather lots of highly controlled hits that don't send me flying everywhere. I had this concept in my head to make a disc look like knives as the bot is named "The Butcher" after all. I'm actually really happy with how the design came out actually. Looks really sturdy, uses the same pulley interface as my disk blade, has both positive rake and tooth relief, and comes in almost the exact same weight as the other disk. Even if it isn't as effective as I'd want it to be in combat I think it looks really cool. Might have to get some stickers made up of this as a logo to throw on the top of the bot.
With the new weapon motor upgrades, the weapon only has a theoretical top speed of around 4,500 RPM, which is relatively low compared to some spinners in the field. The hope is to have a much faster spin up time as most arenas for 12 lb bots are relatively small given the speeds at which these things move. This will hopefully let me land more consistent hits and stay spinning the whole match. Top speed is less important for this right now as the weapon is still over 3 lbs and almost 10" effective diameter, should still hit hard, even at lower speeds. I've never successfully made it to "top speed" with this bot anyway as the weapon system has been plagued with issues it's whole career.
Given this lower top speed I wanted to try and design a disk with more teeth for when I fight wedged opponents and am not going for the knockout hit, but rather lots of highly controlled hits that don't send me flying everywhere. I had this concept in my head to make a disc look like knives as the bot is named "The Butcher" after all. I'm actually really happy with how the design came out actually. Looks really sturdy, uses the same pulley interface as my disk blade, has both positive rake and tooth relief, and comes in almost the exact same weight as the other disk. Even if it isn't as effective as I'd want it to be in combat I think it looks really cool. Might have to get some stickers made up of this as a logo to throw on the top of the bot.
General Upgrades
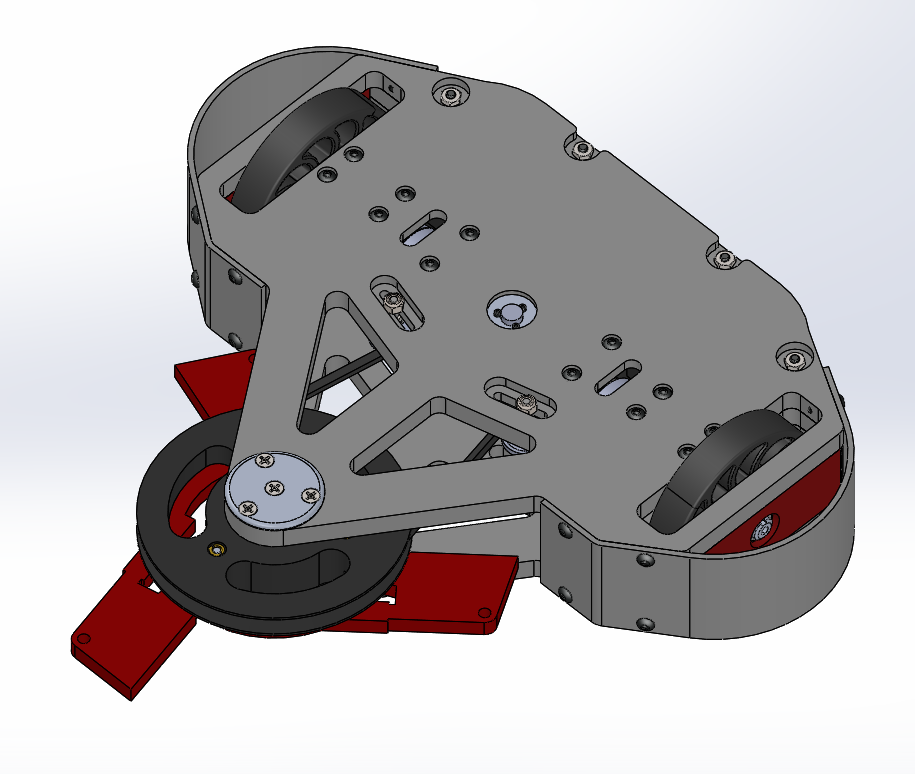
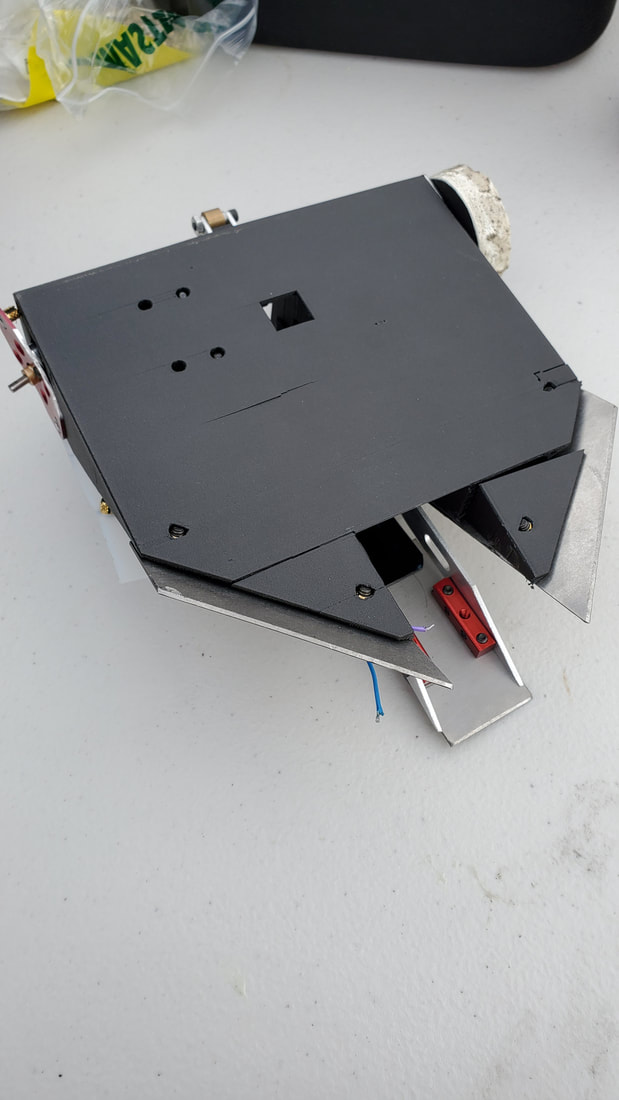
In addition to these two major upgrades, there were a lot of small things that I fixed that don't really need their own section. Mainly fixing screw and nut clearances to make it easier to assemble. I got rid of a few of the shoulder bolts and frame pieces in front of the drive motors, opting instead to use the drive motors as from pieces to mount the top and bottom plates to. Like I mentioned in the intro, I wanted to keep the weight distribution the same and looking at the picture below, you can see where that ended up. I usually try to keep my COG just inside the front edge of the drive wheels for a two wheeled bot. That way the bot won't tip up when accelerating quickly, but is still controllable.

Finally, here's a nice glamour shots of the CAD as a whole:


 RSS Feed
RSS Feed
