
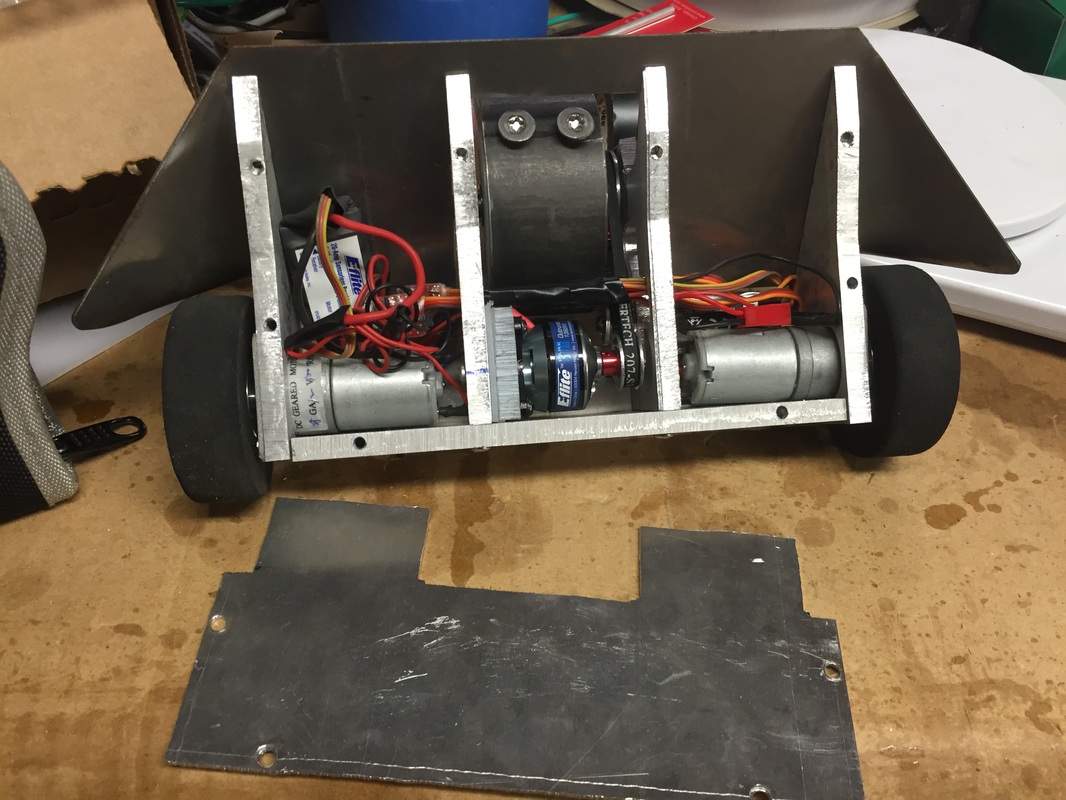
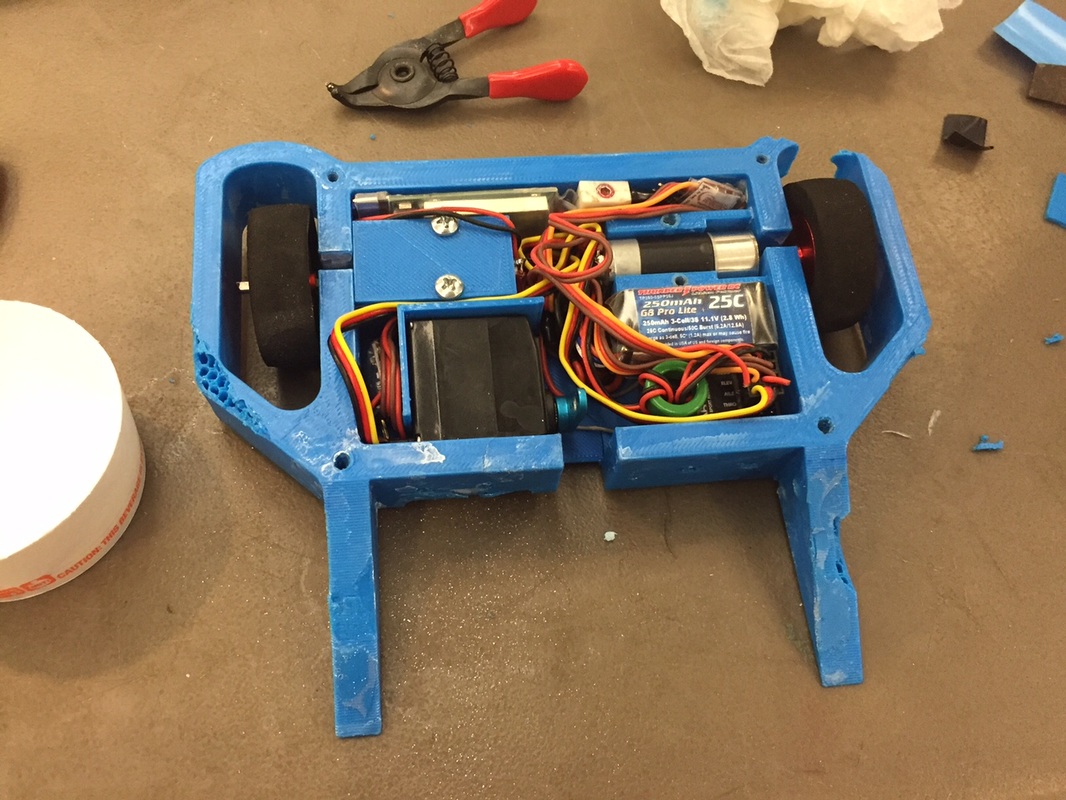
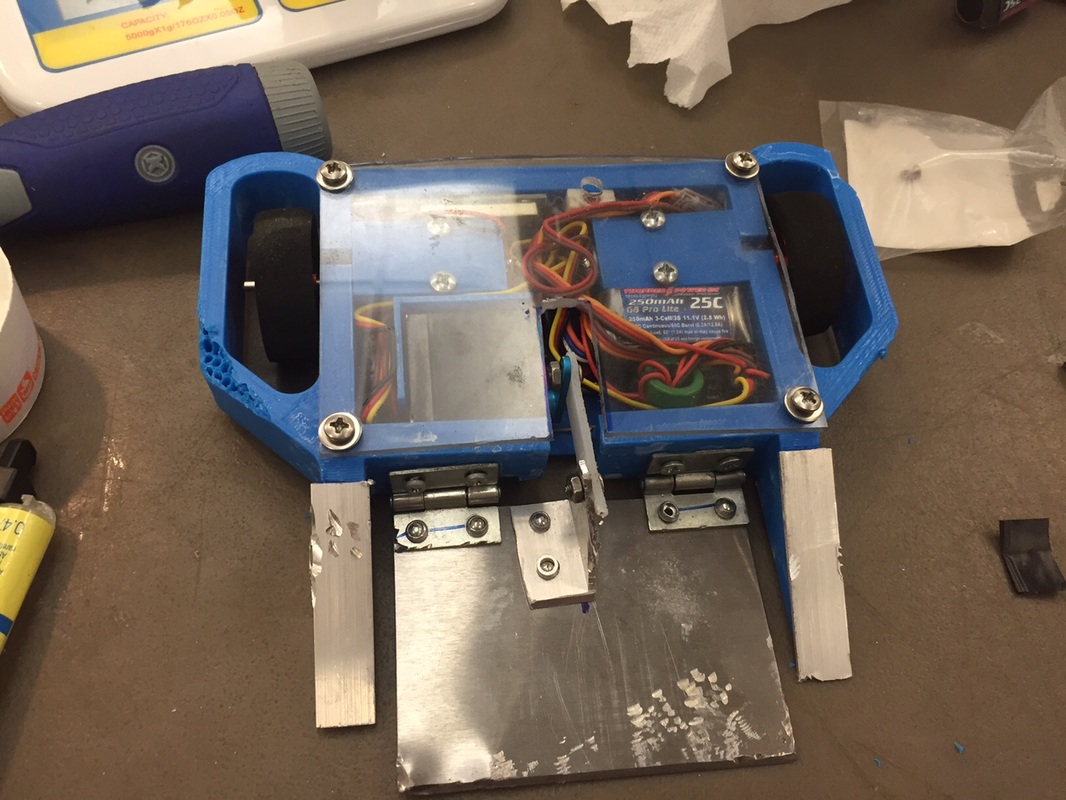
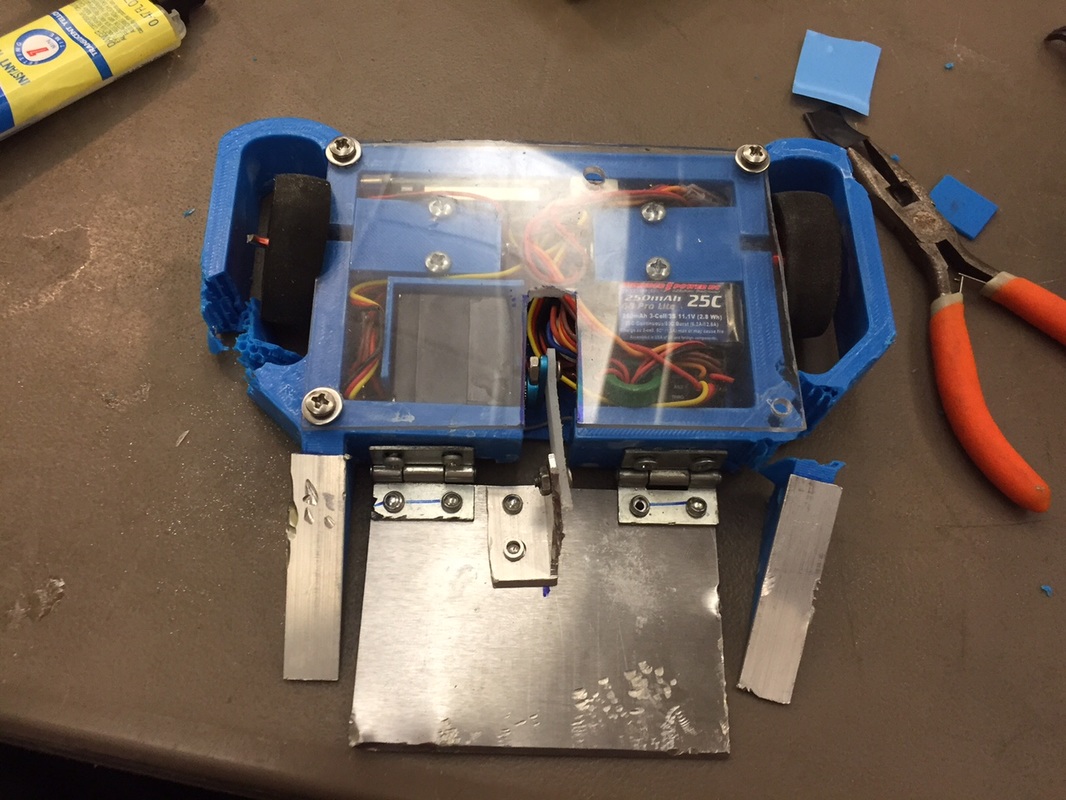
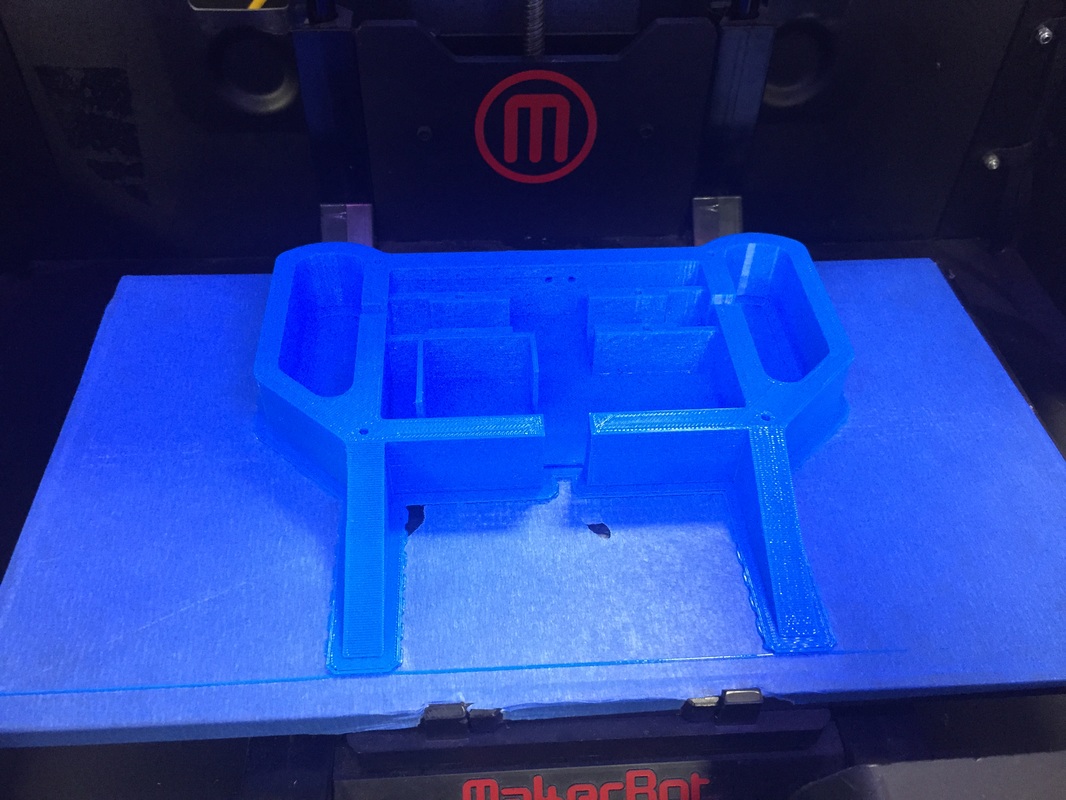
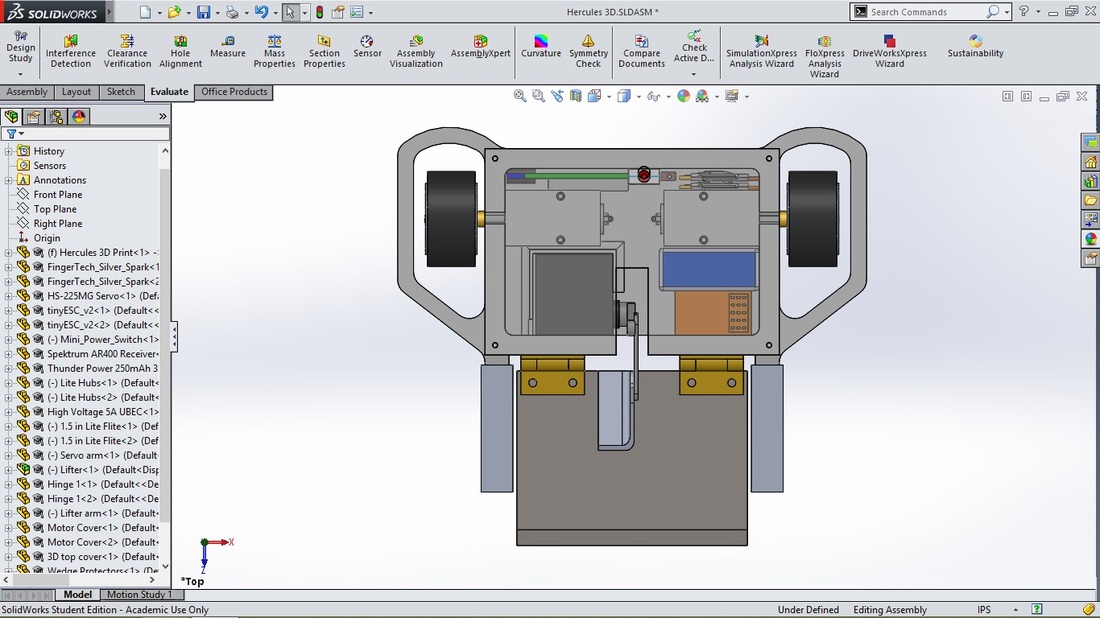
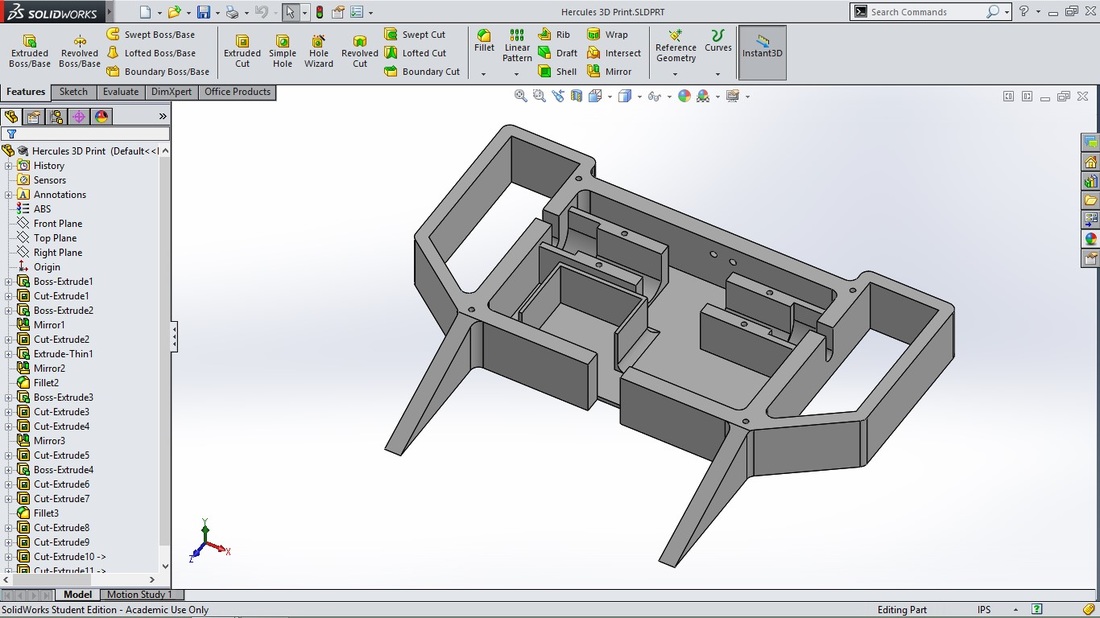
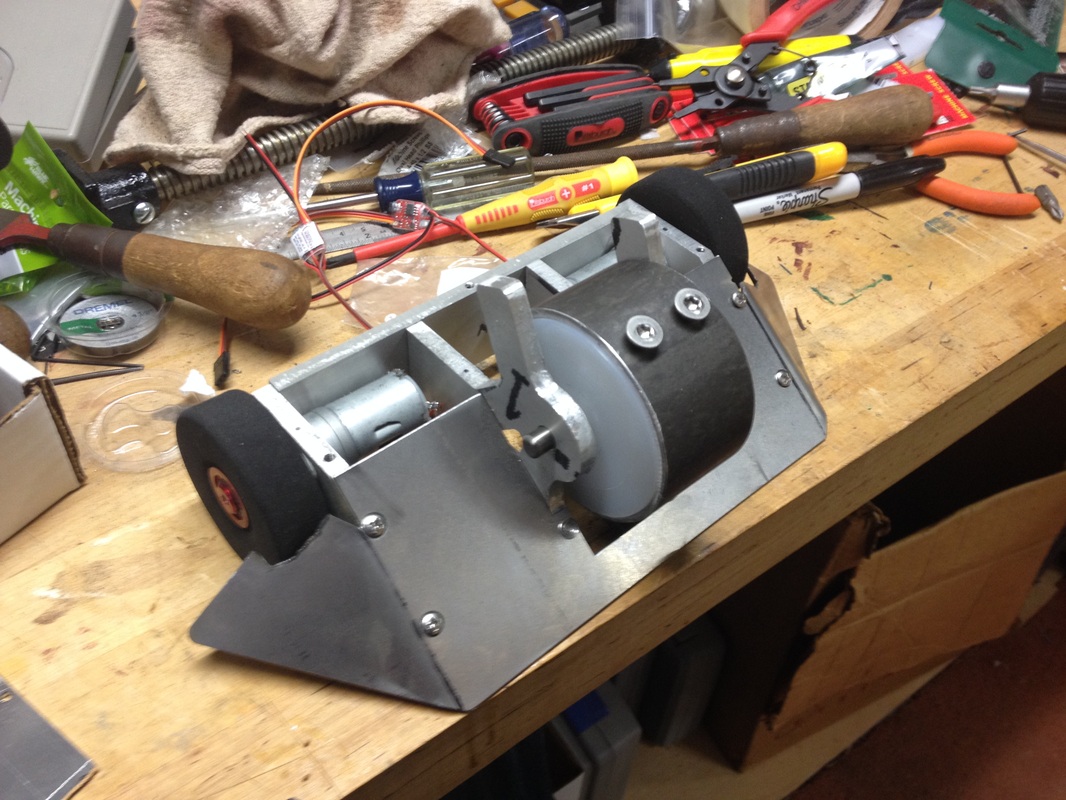
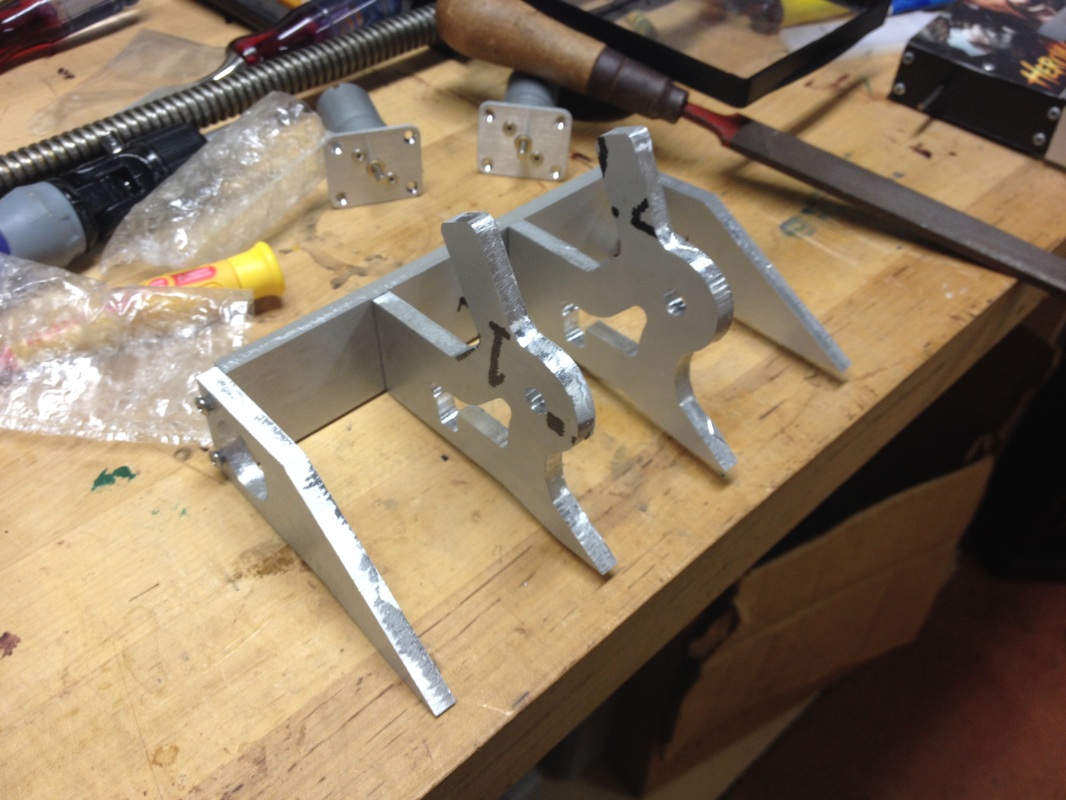
Barrel Roll had some issues in its first competition both electrical and mechanical. Mechanically it was a giant pain to fix. Because of its compact size and my lack of forethought, I had to almost completely take it apart twice during its firs competition. To remedy this, I remade the center frame rails with removable caps so that the drum could be more easily removed if needed.
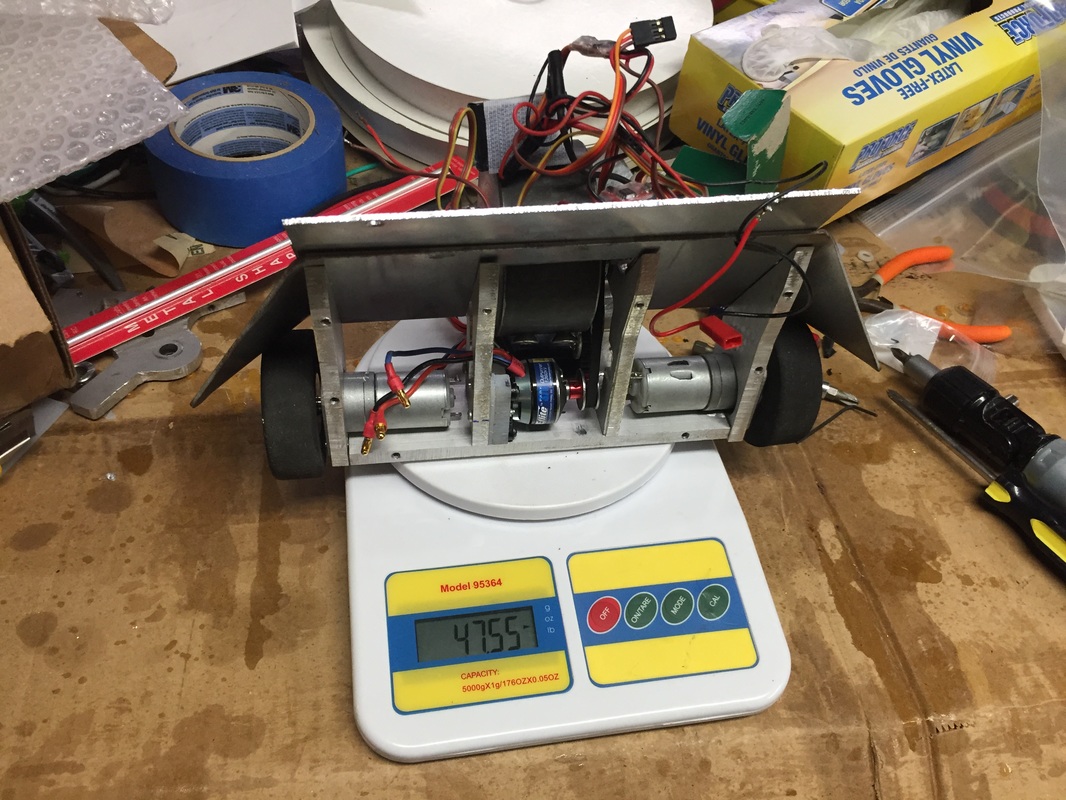 | 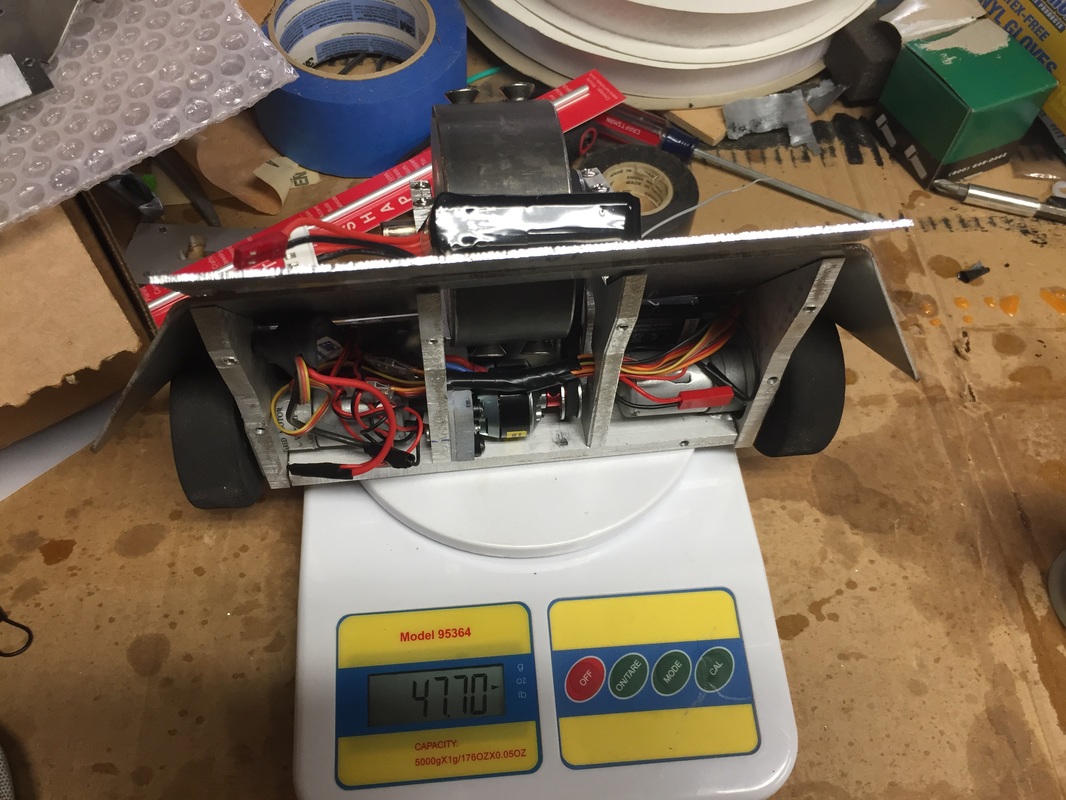 |
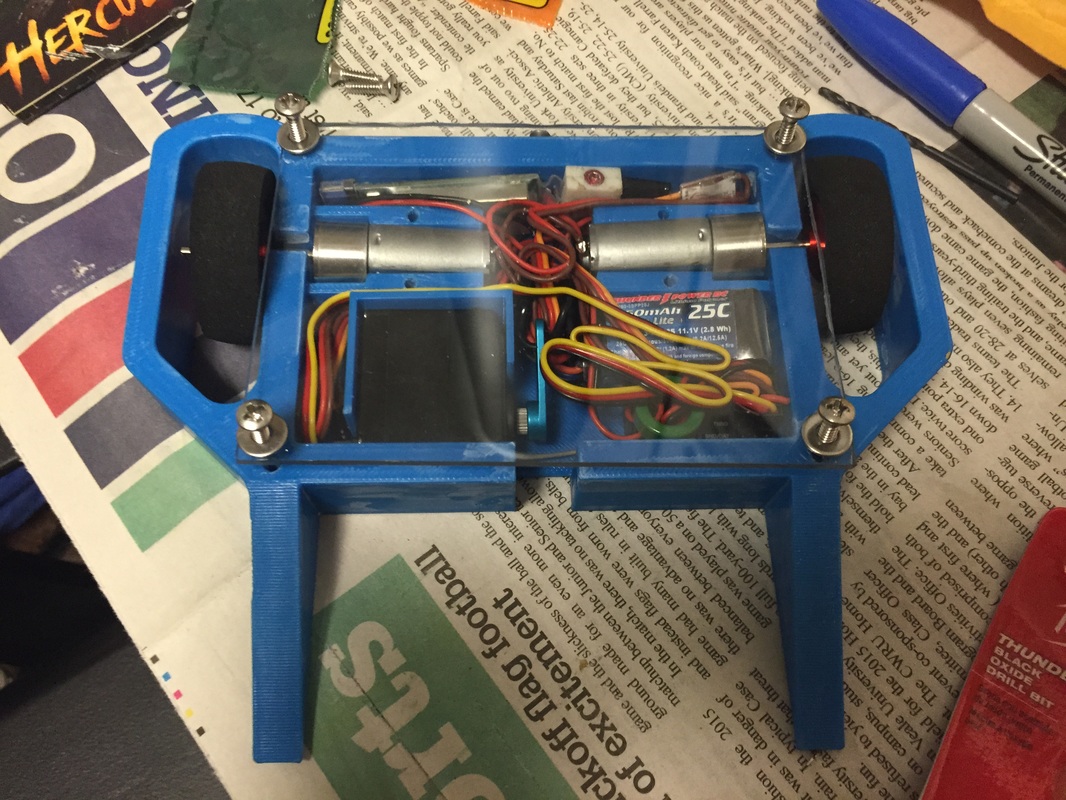
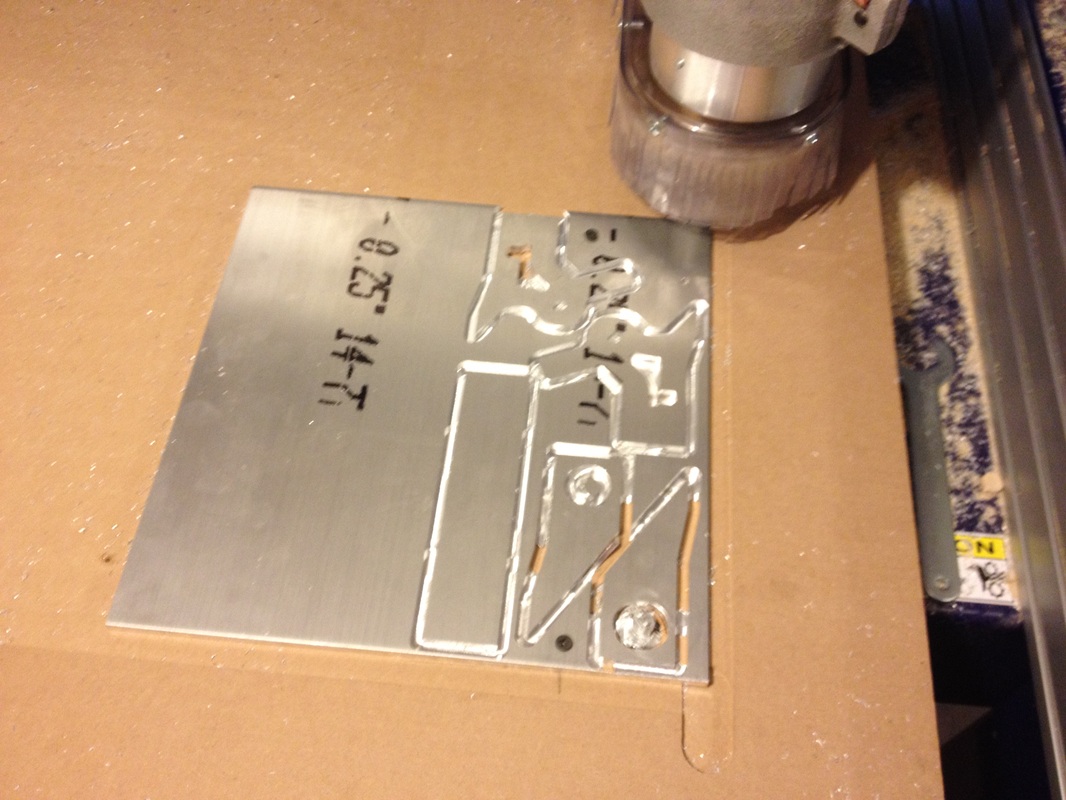
Another issue was weight. I was .3 oz overweight at weigh in last time. So to correct this, I added more pockets to the rails to remove some weight. This left me just slightly underweight at 47.7 oz. Hopefully the scale at Motorama is close enough to my scale that I'll still be underweight at the competition.
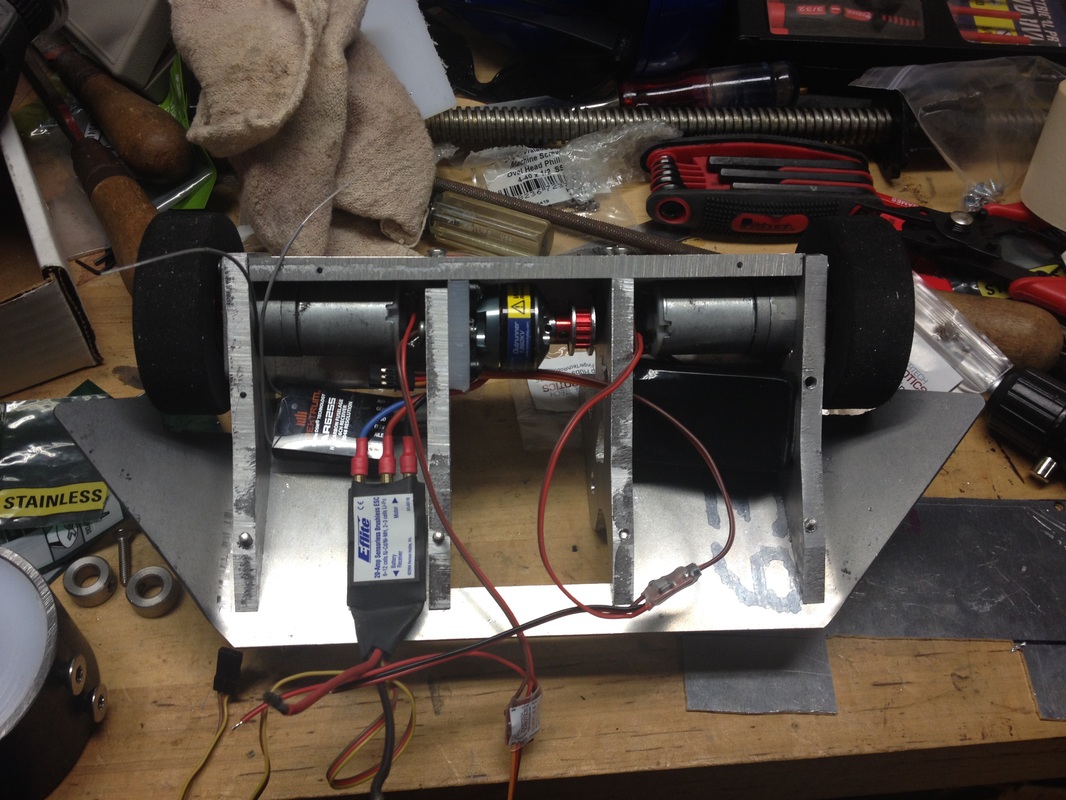
Finally, the part I dread the most, the electrical issues. At motorama 2015 Barrel Roll was knocked out twice due to electrical issues.Part of the problem I found was that the heat shrink on my Fingertech switch had come loose and the system was shorting out on the frame. This was an easy fix, but not the end of the story. Barrell Roll had issues with going where it was told. Each of the motors would at one time or another spontaneously switch directions, which is not ideal when you're trying to maneuver around an opponent trying to tear you apart. After countless hours of trying to remedy this ( Recalibrating ESCs, rebinding, adding capacitors across the motors, switching receivers, switching ESCs, etc) I finally came to the conclusion that the BEC in my brushless ESC was acting up and would brown out causing the motor issues. Unfortunately during this process I accidentally shorted out the battery and fried my reciever. But besides that, all Barrel Roll needs for Moto 2016 is a paint job and it's ready
















 RSS Feed
RSS Feed
