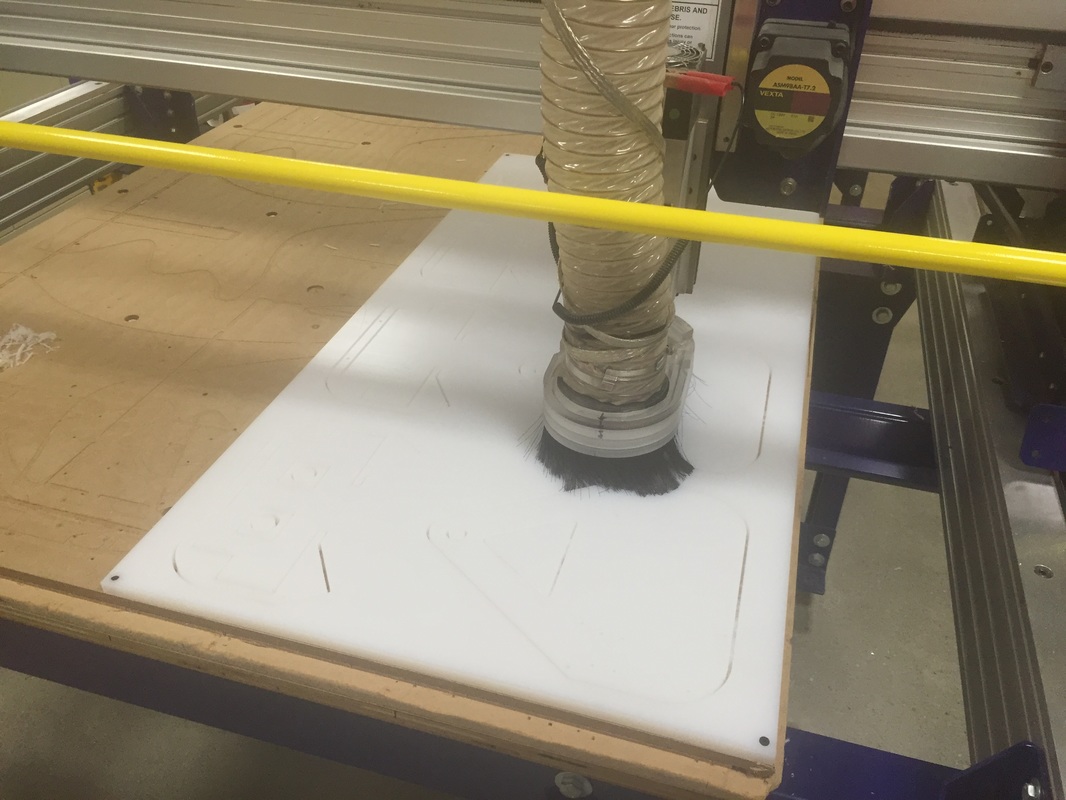
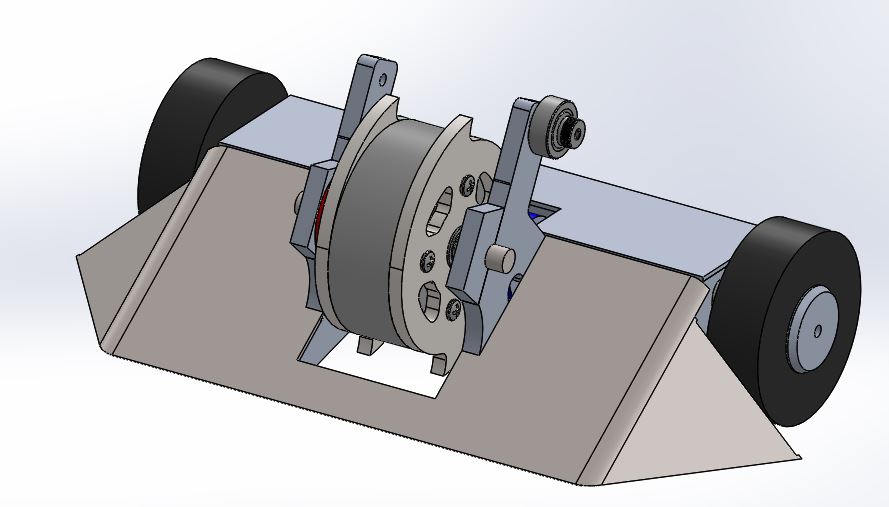
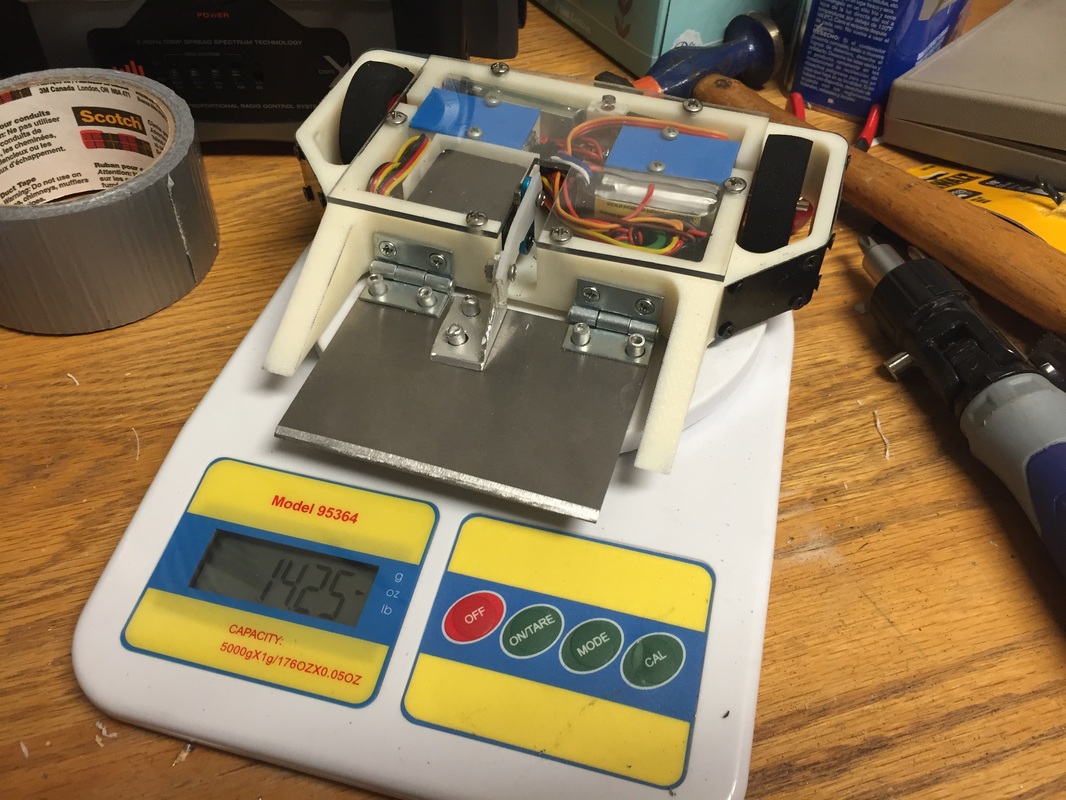
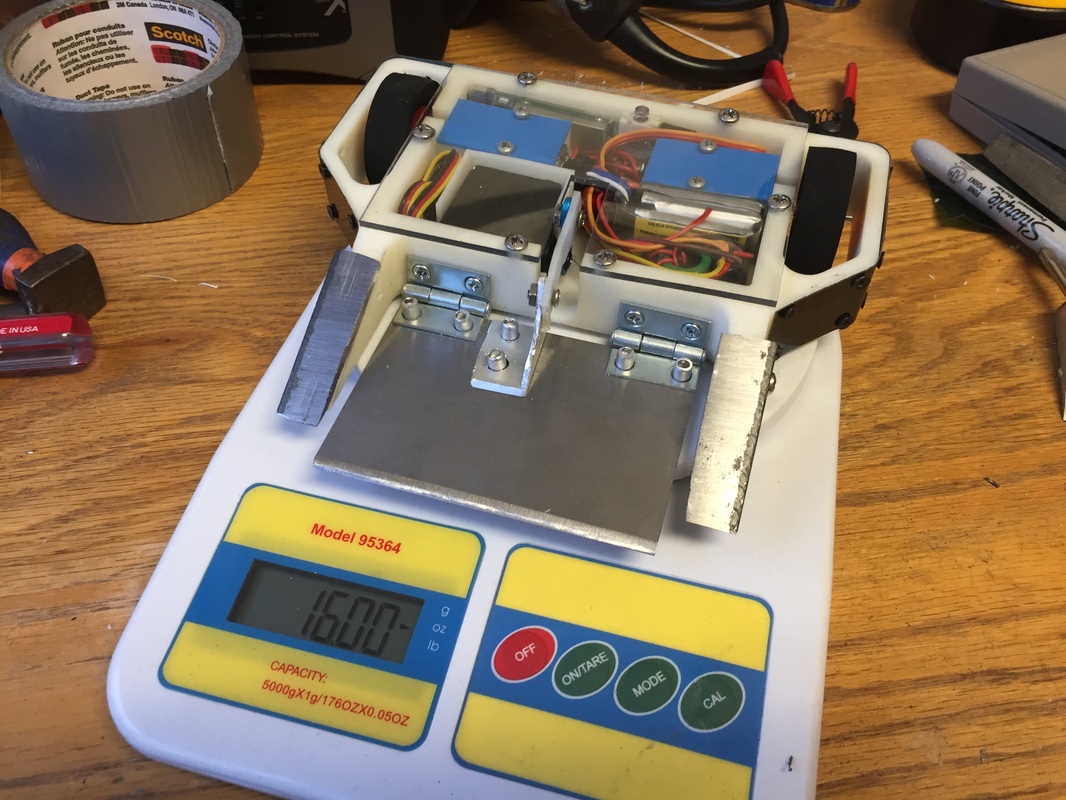
Made a lot of progress in the past 24 hours. I'm slowly machining the end caps for Butcher that will hopefully be done in the next couple of days if I get time to work in the shop. The most exciting thing that happened was plasma cutting the discs for the pseudo drum of the new and improved Barrel Roll. They need some post machining to be usable but they look great for now.

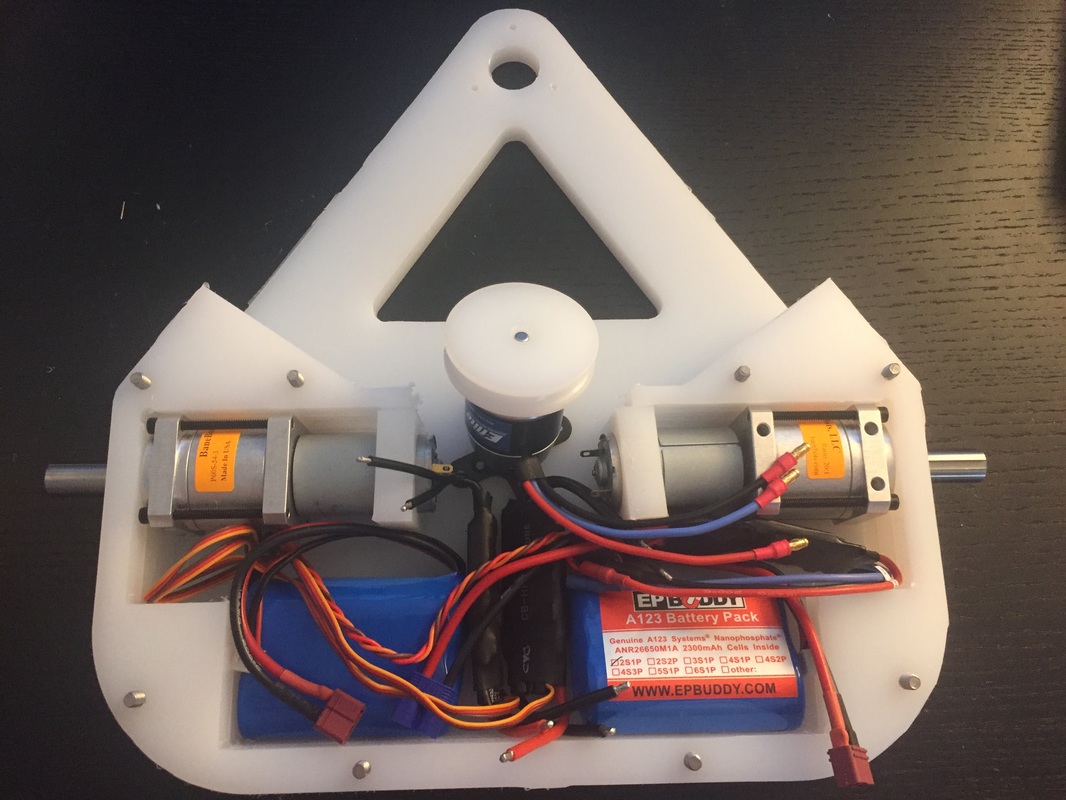
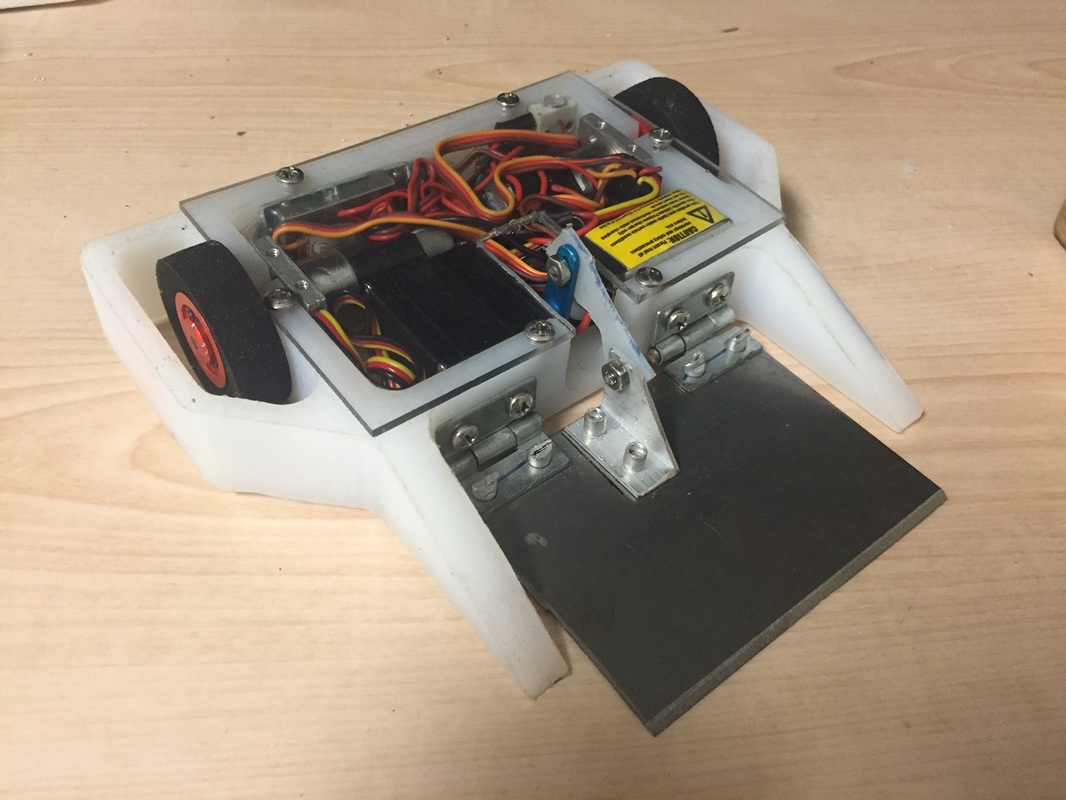
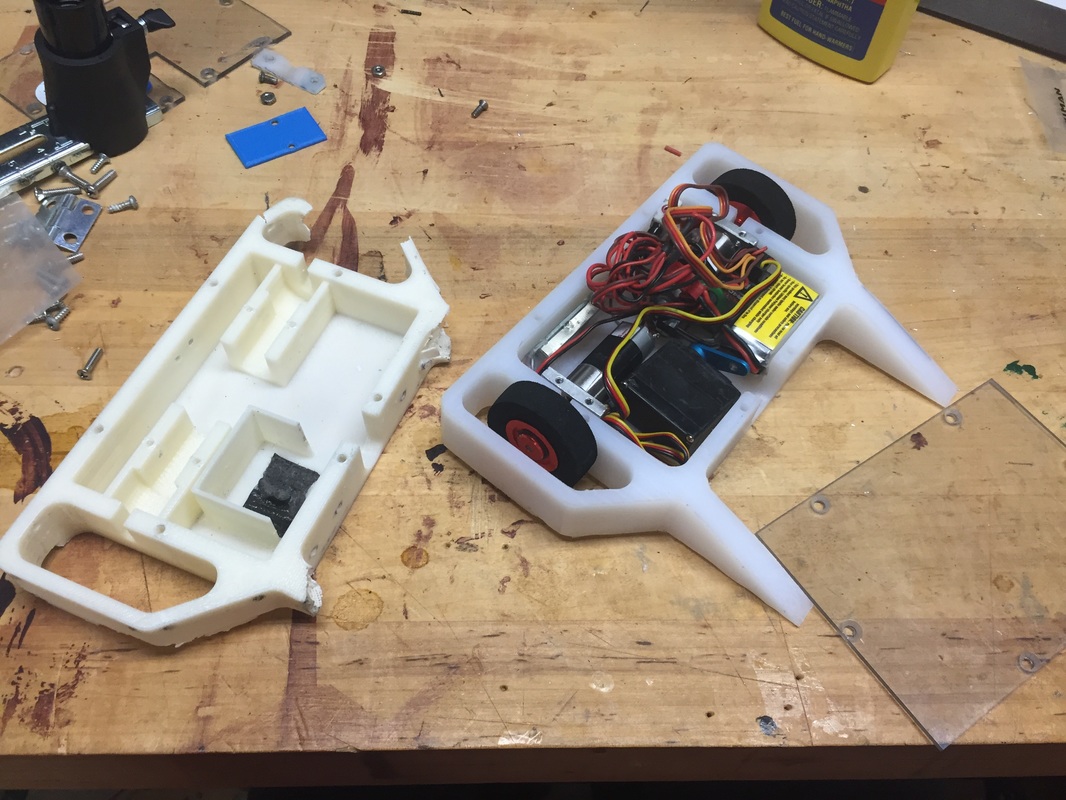
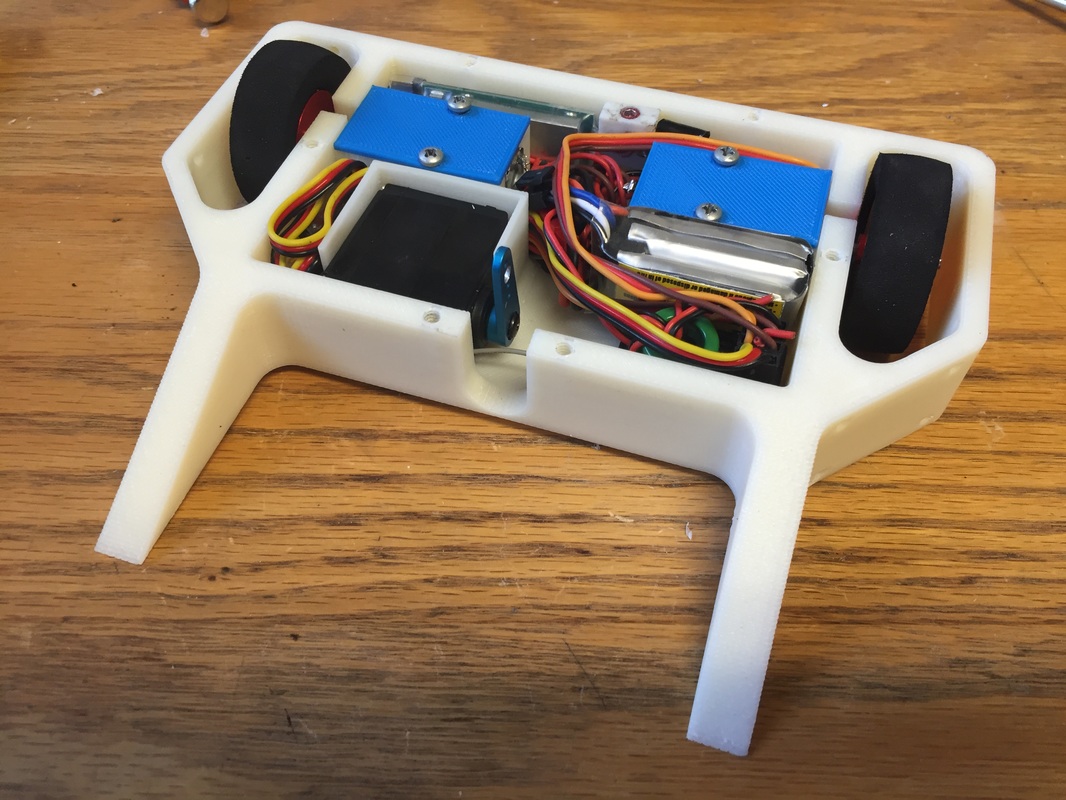
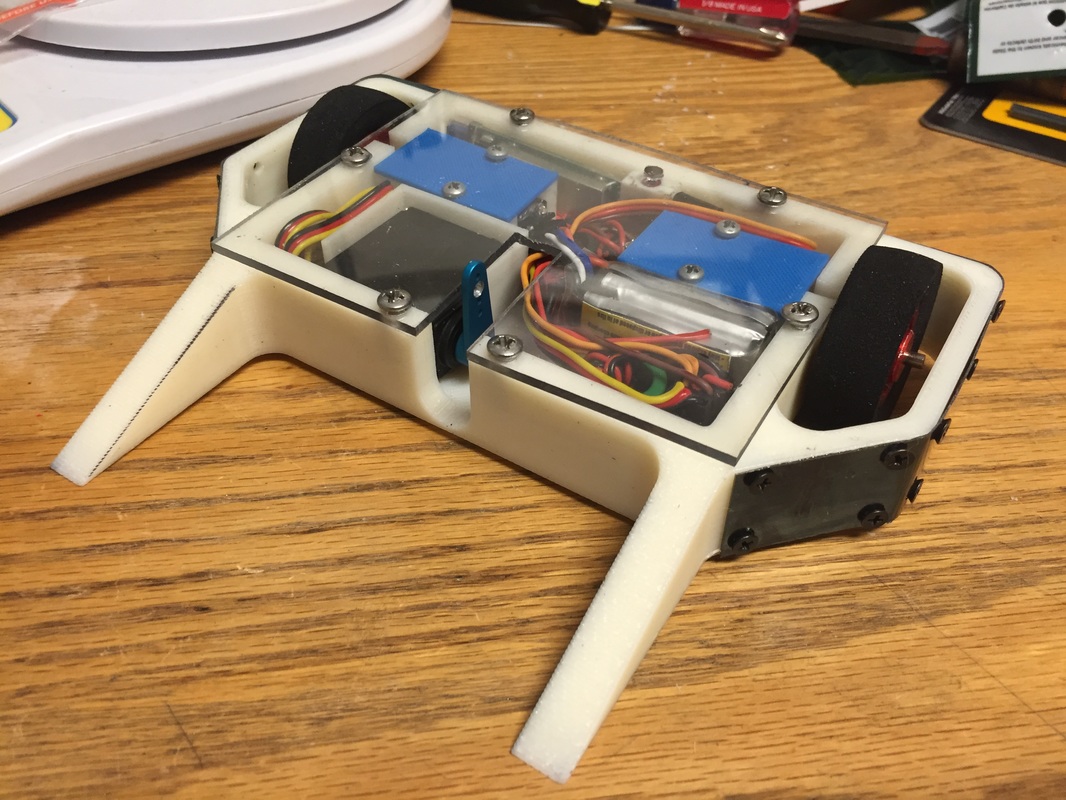
I also finally have all of the electronic parts for the Butcher in. I'm going to try and wire it all up tonight or tomorrow and hopefully have a functioning drive train by the weekend. Just 3 more weeks until Philly!






 RSS Feed
RSS Feed
