I've been pretty busy with school lately, but I've used what little free time I have to finish up El Tigre. I unfortunately forgot to take a lot of pictures, but they would've been pretty boring anyway.

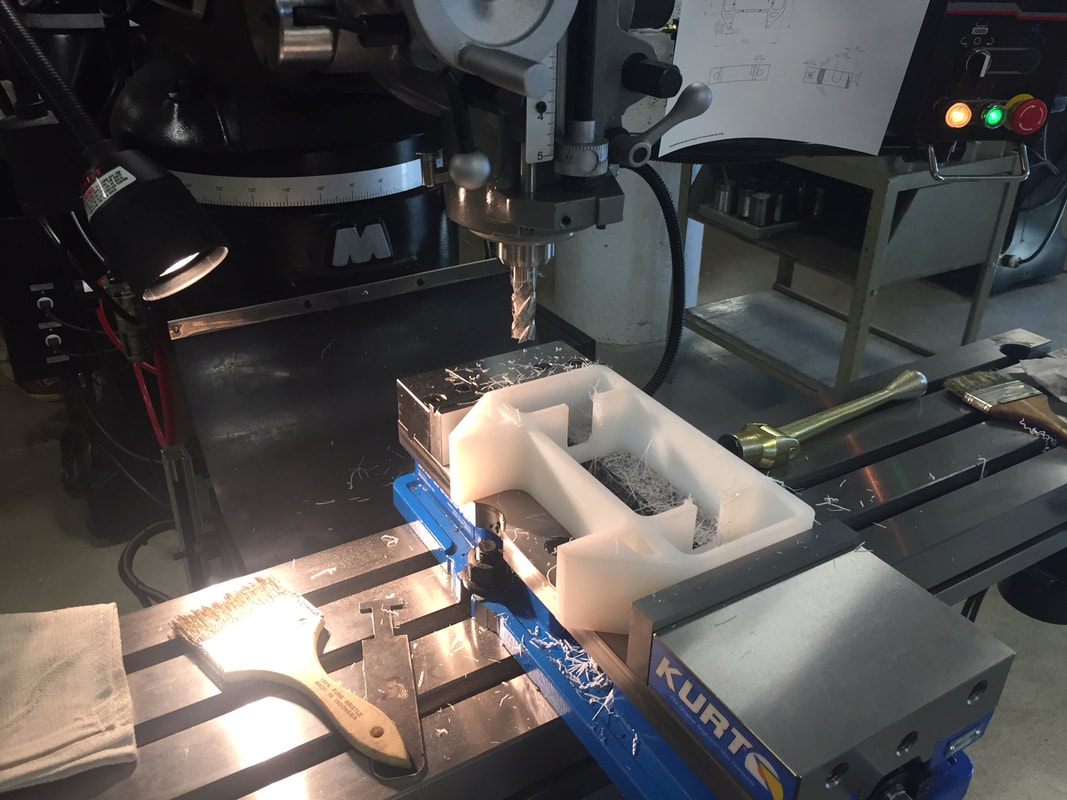
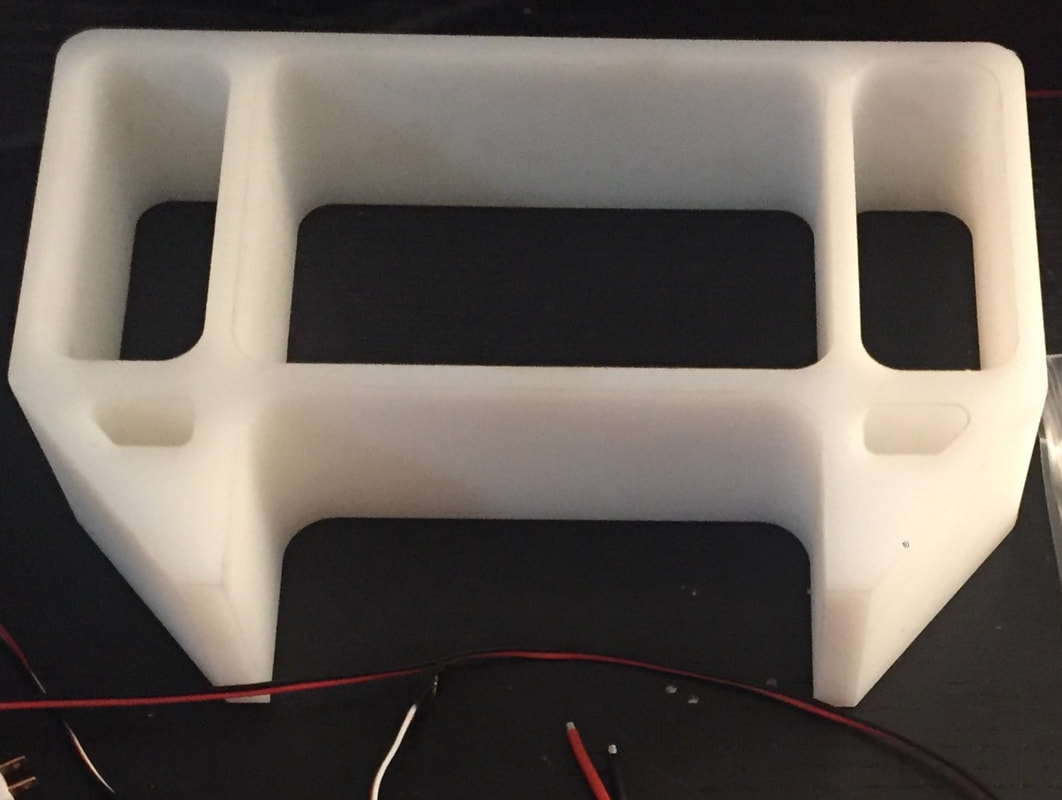
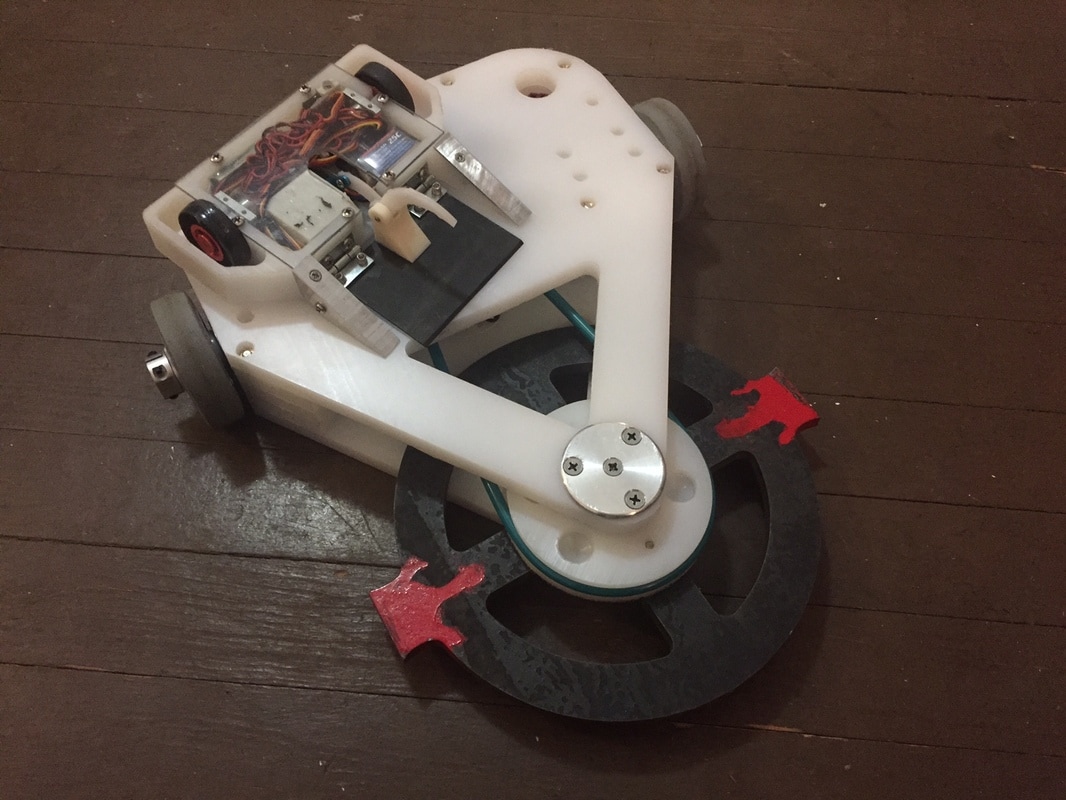
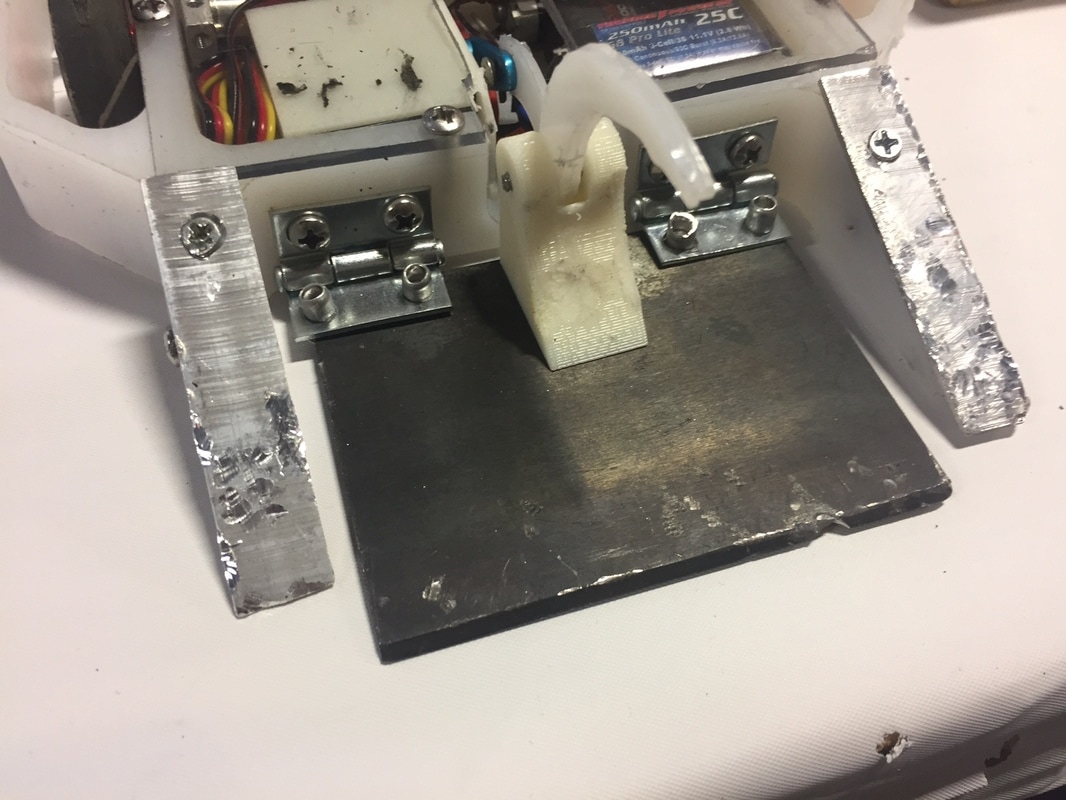
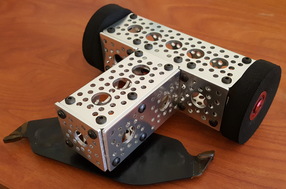
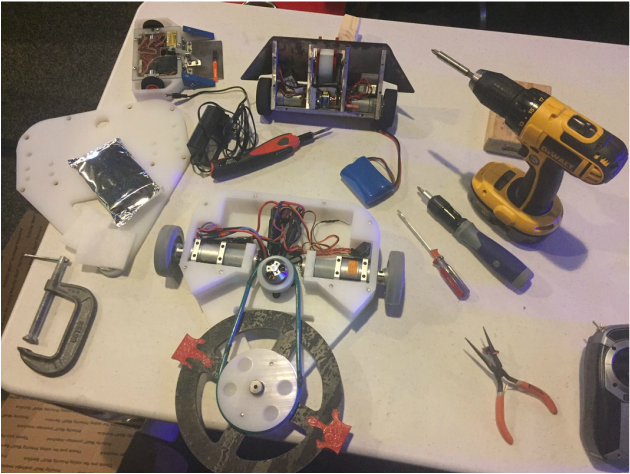
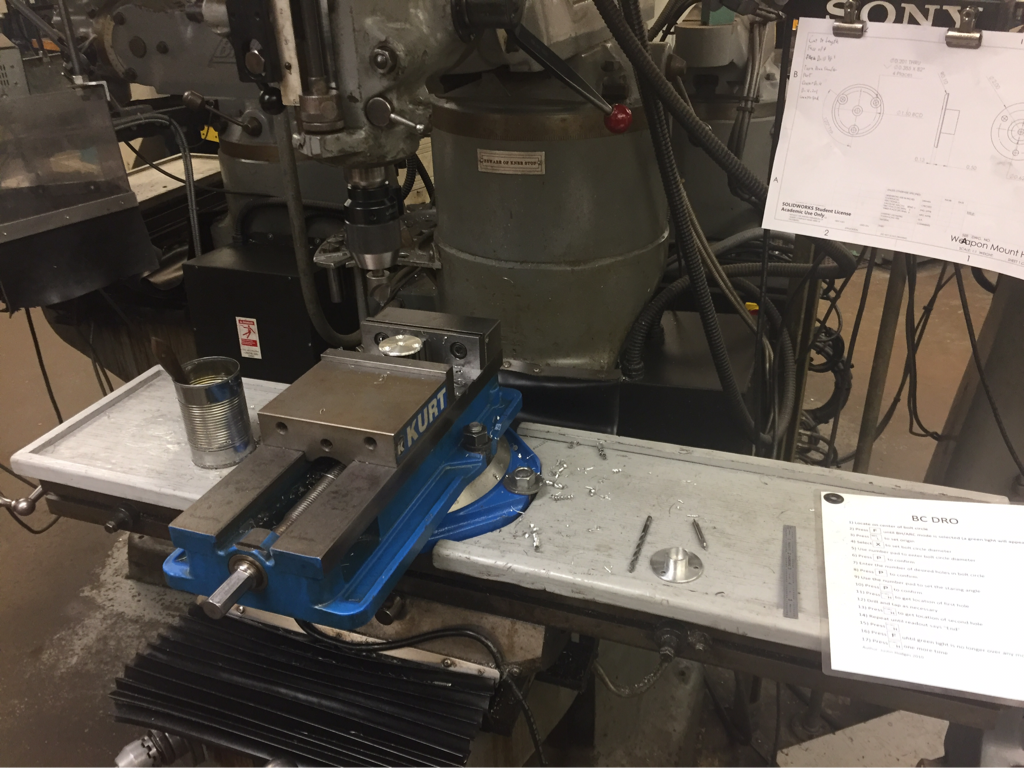
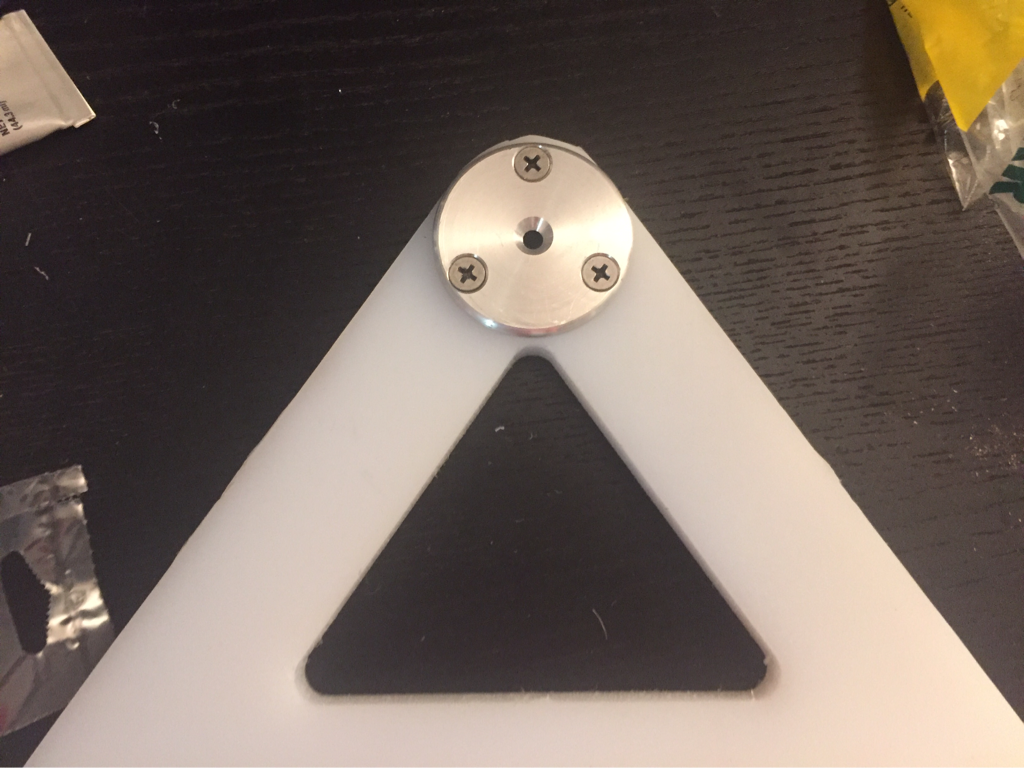
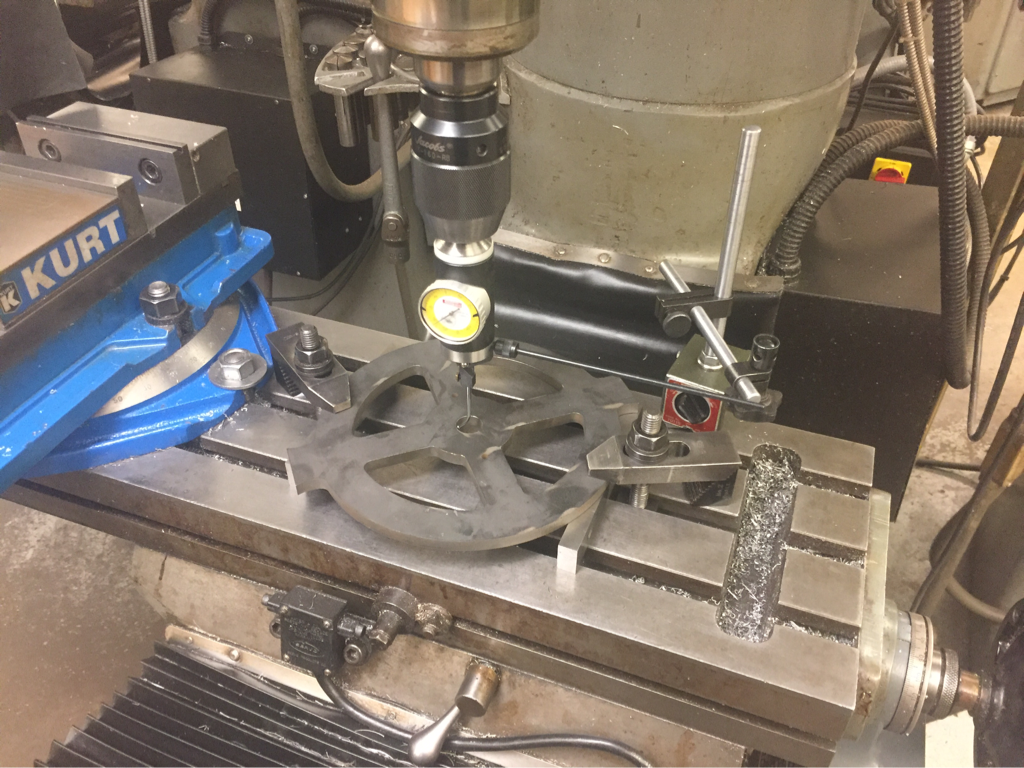
First, I finished milling up and drilling the holes in the wedgelets. I sanded them and buffed them so they were shiny because I can and it looks better this way.
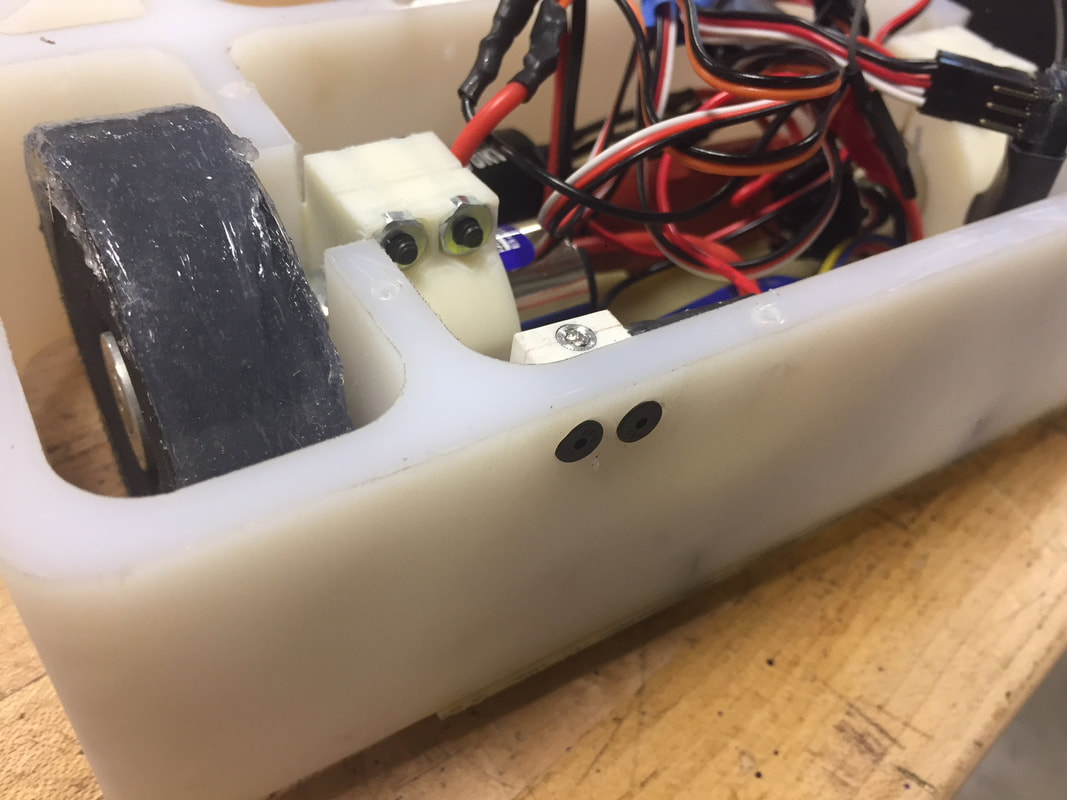
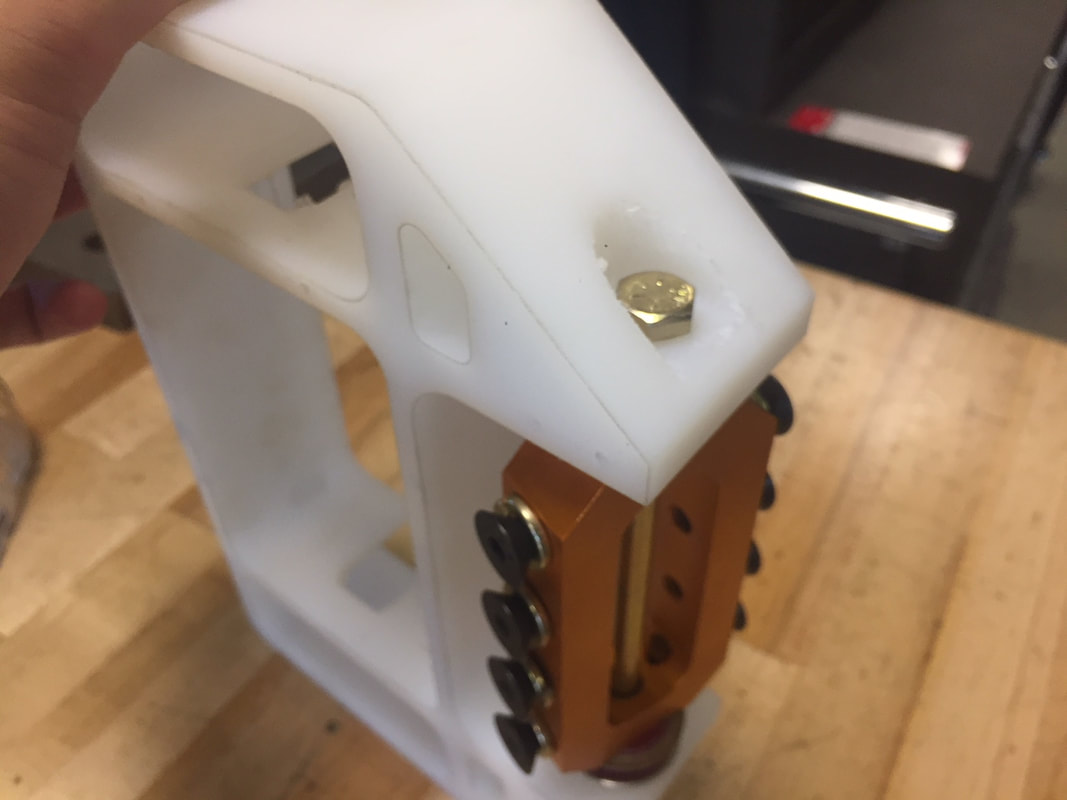
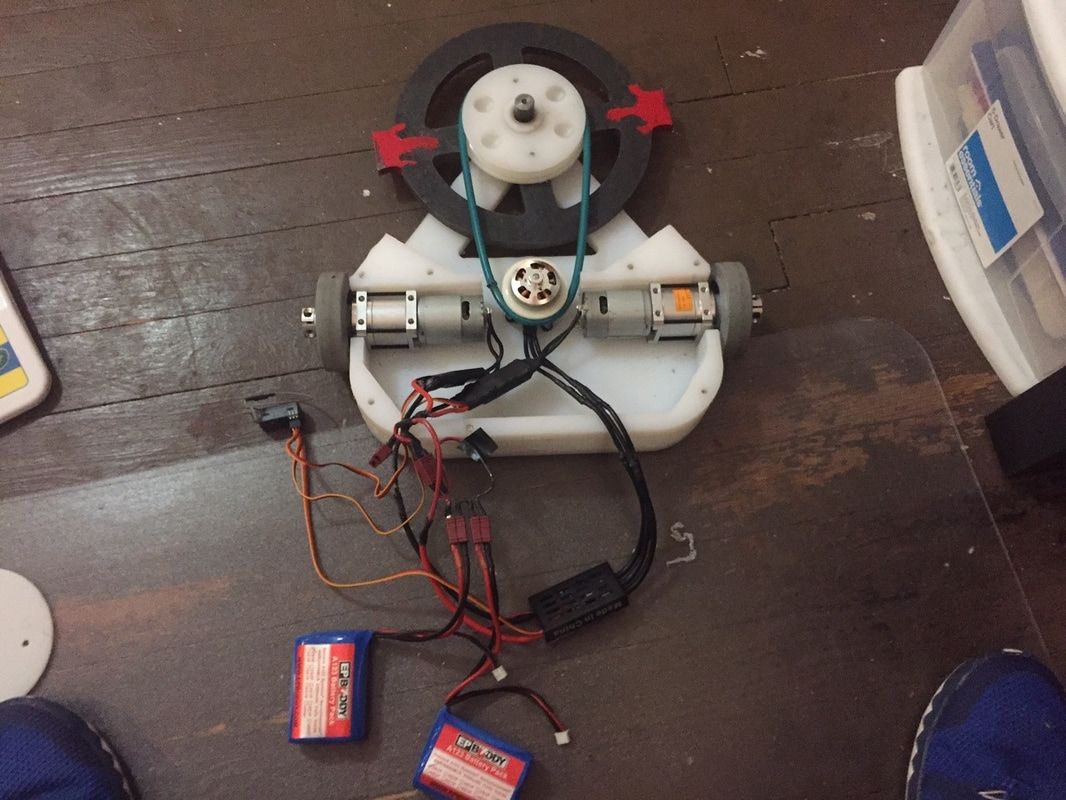
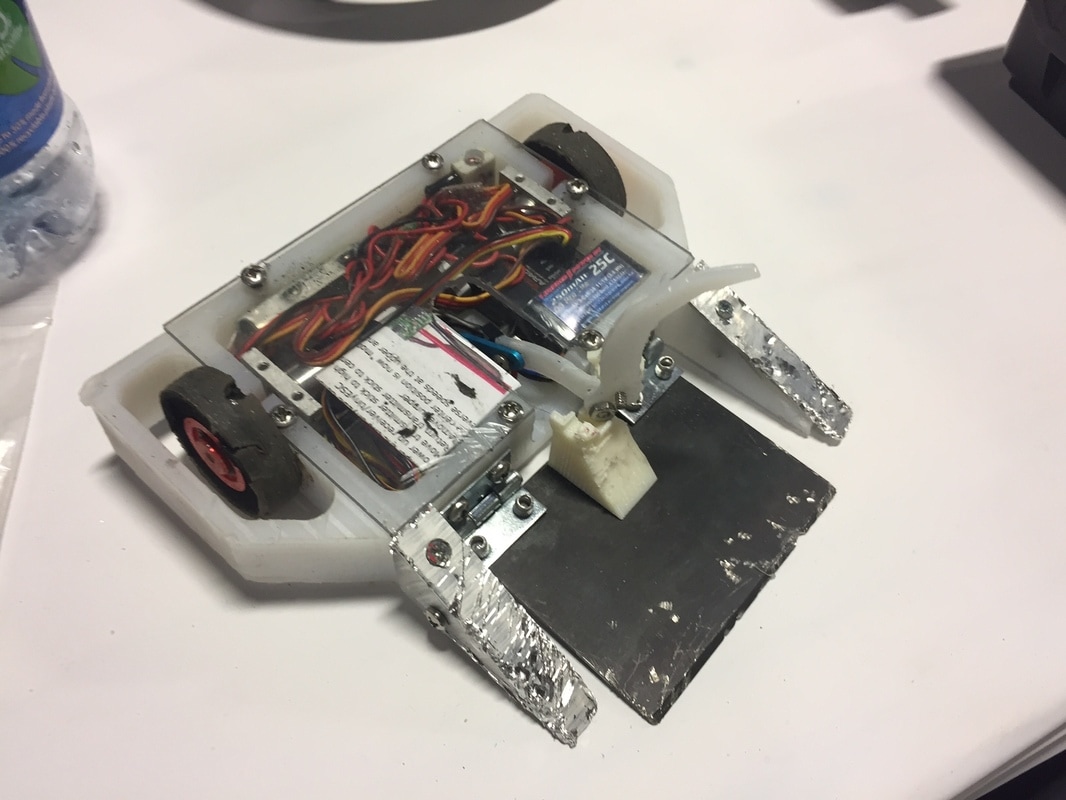
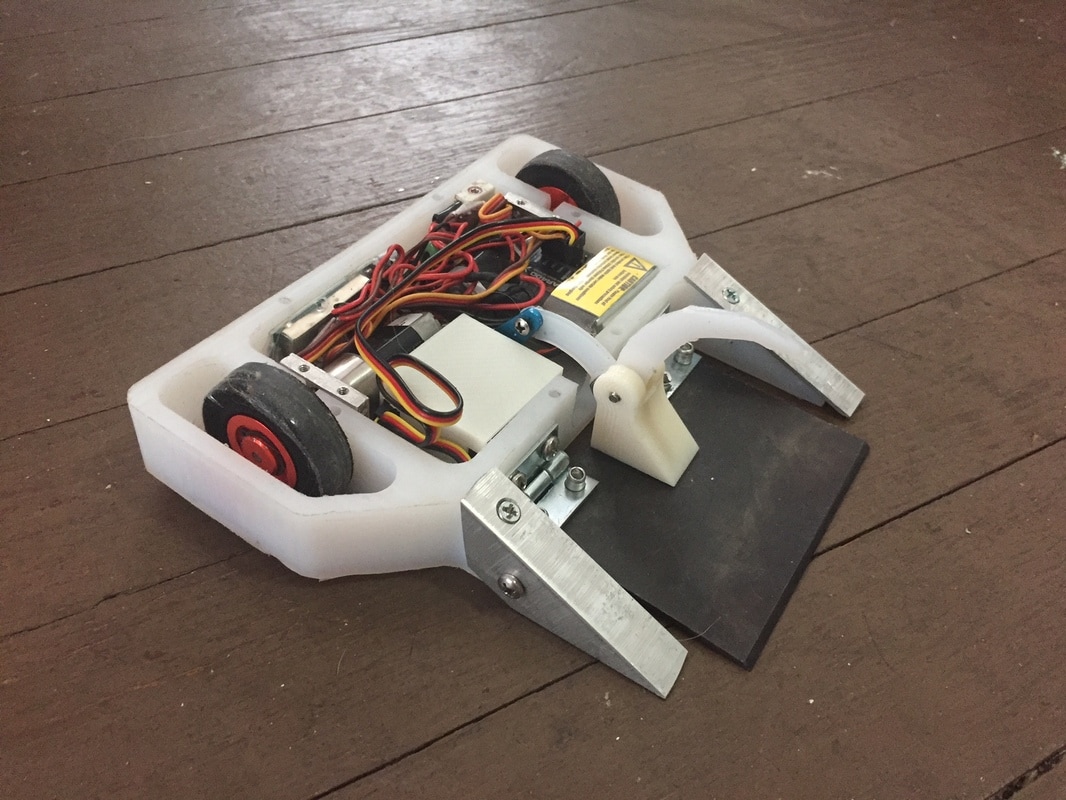
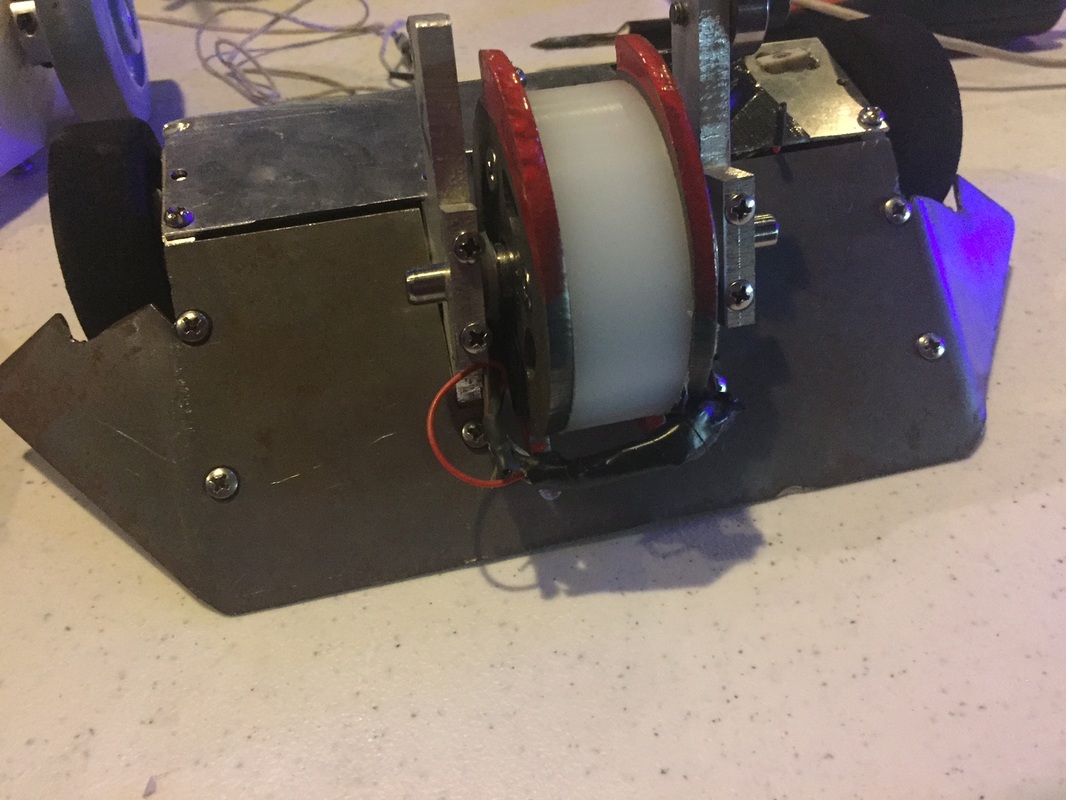
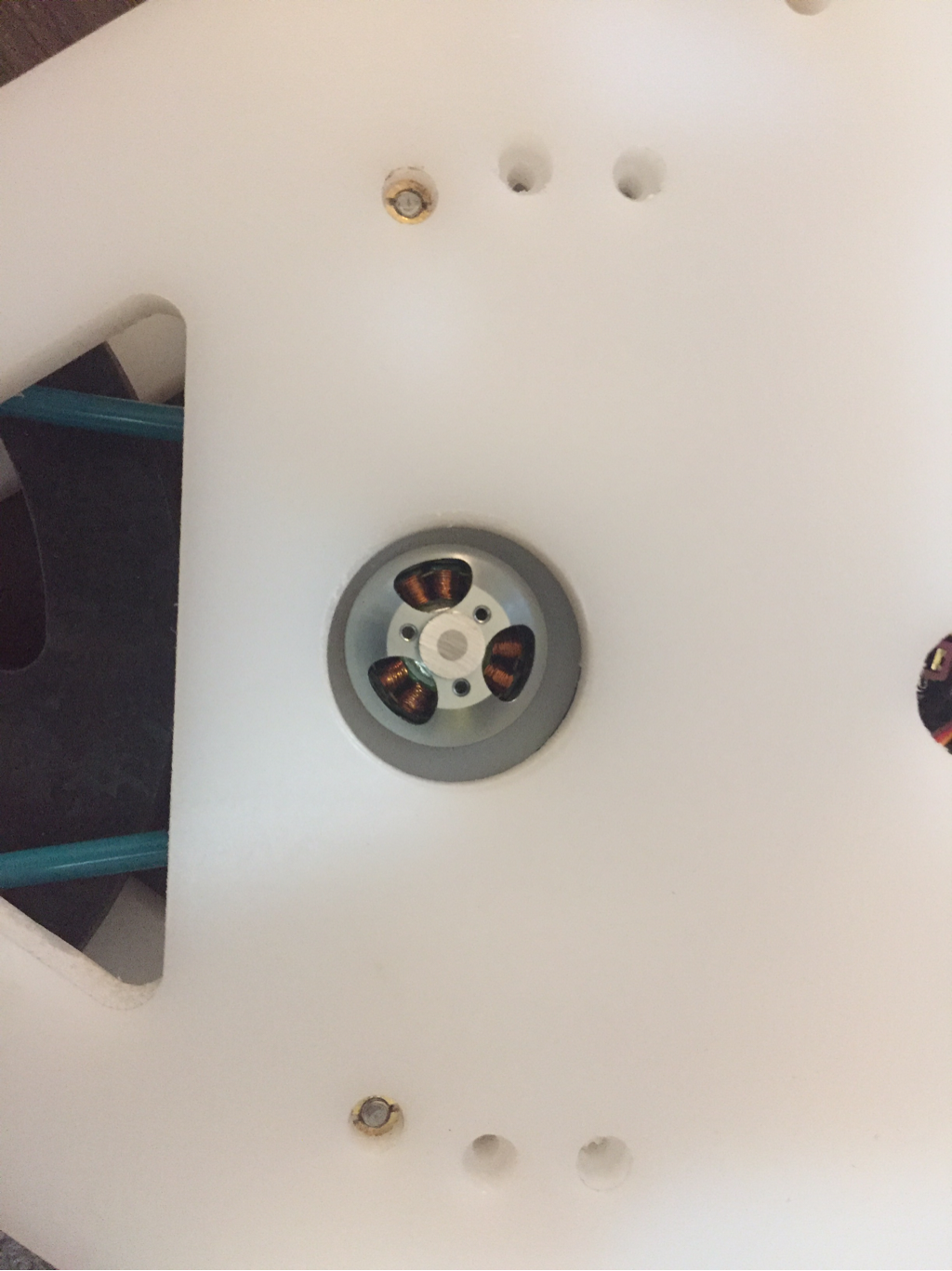
I drilled some holes and tapped the Fingertech Mini Powerswitch so I could mount it. You can also see the silicon coating that I put on the wheels in this picture. The process for that is pretty straight forward. I used 100% silicone caulking, put a bead around the tire, and with the wheels spinning smooth it out into one thin layer with your finger. I put 3 layers on each wheel to give a decently thick coating to improve overall traction.
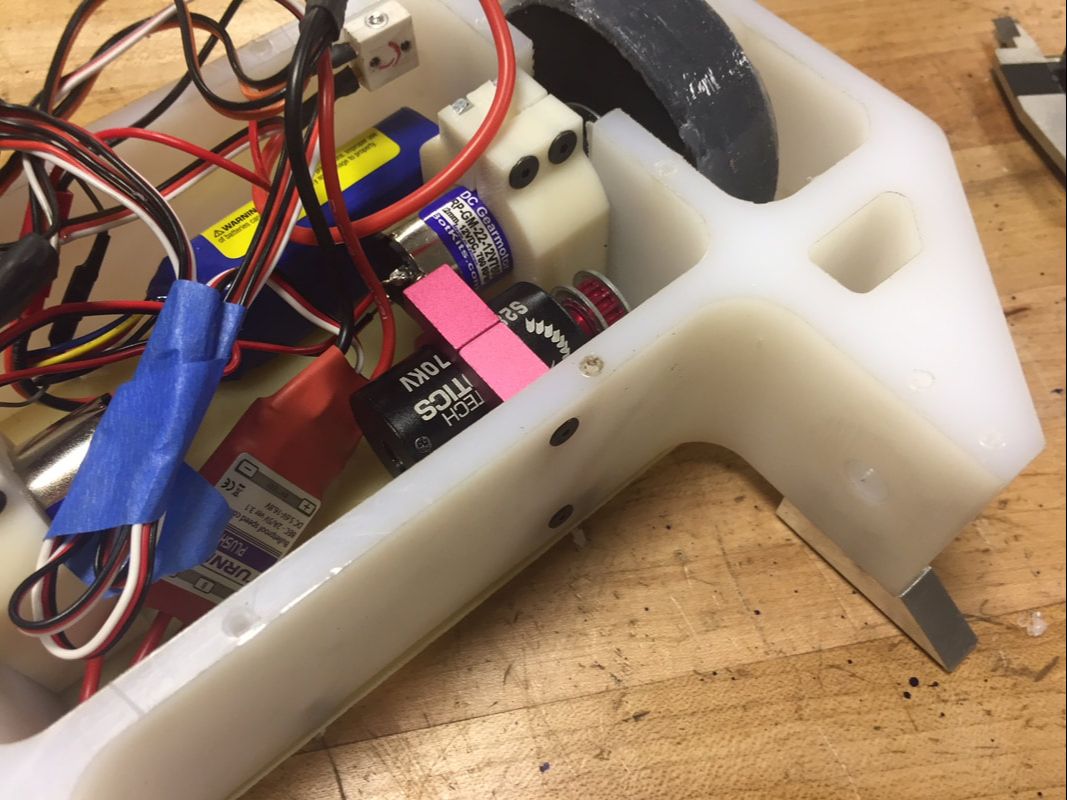
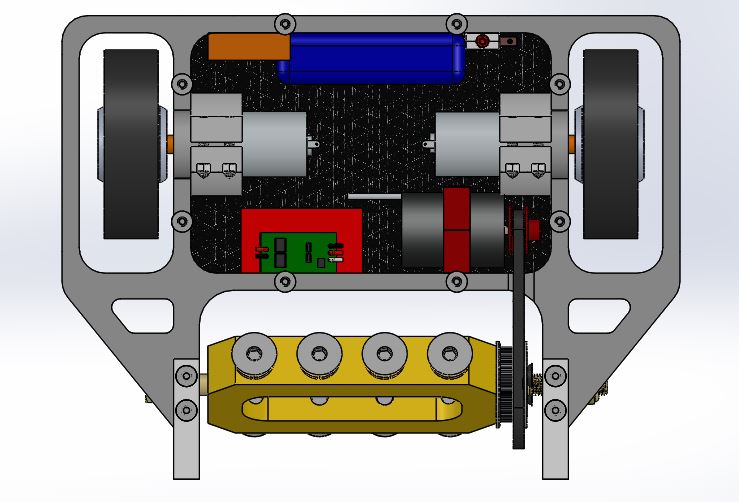
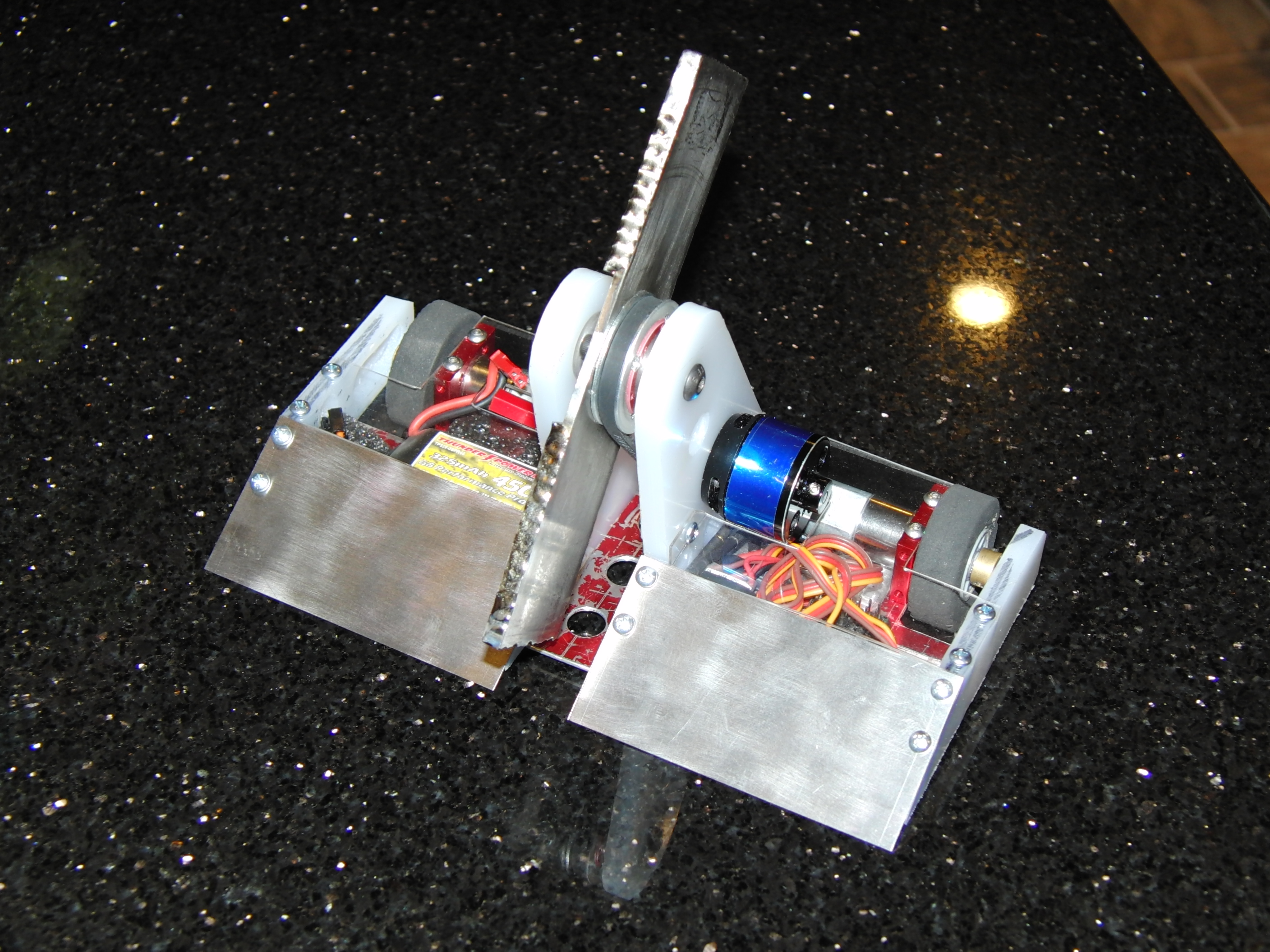
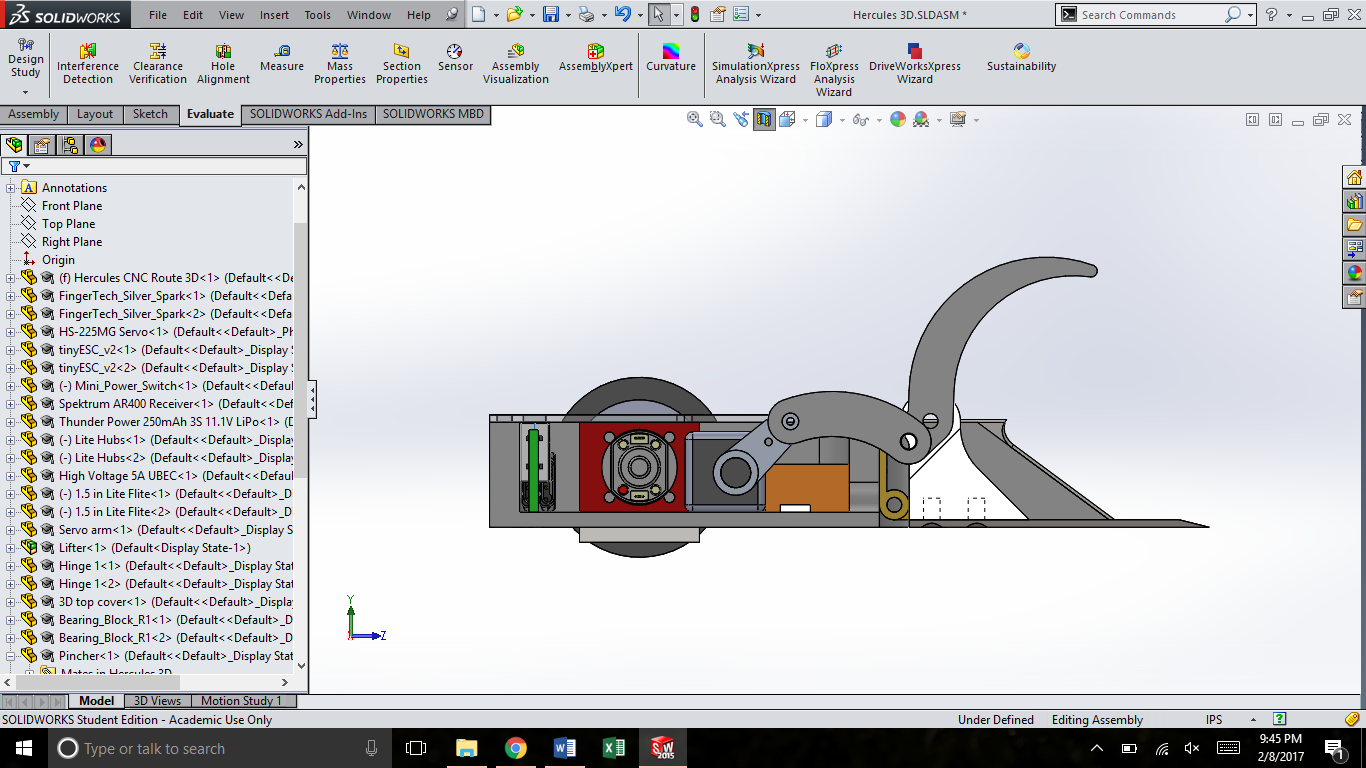
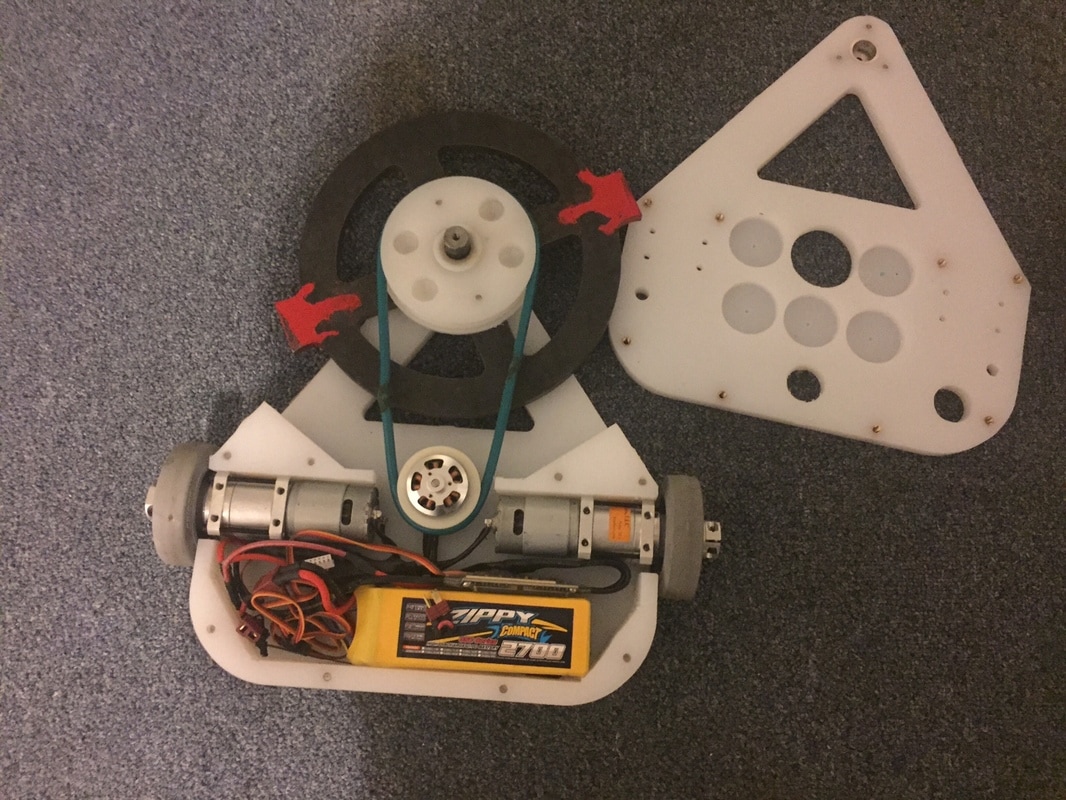
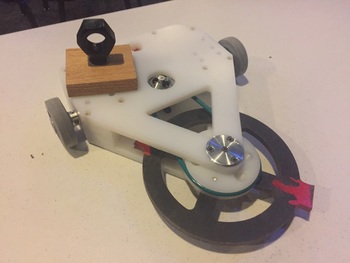
I also drilled out and tapped holes in the motor mount in order to mount the weapon motor to the inside of the front wall. I don't have a good picture of it, but I also went ahead and drilled a slot for the weapon belt to pass through the front wall from the motor to the beater.
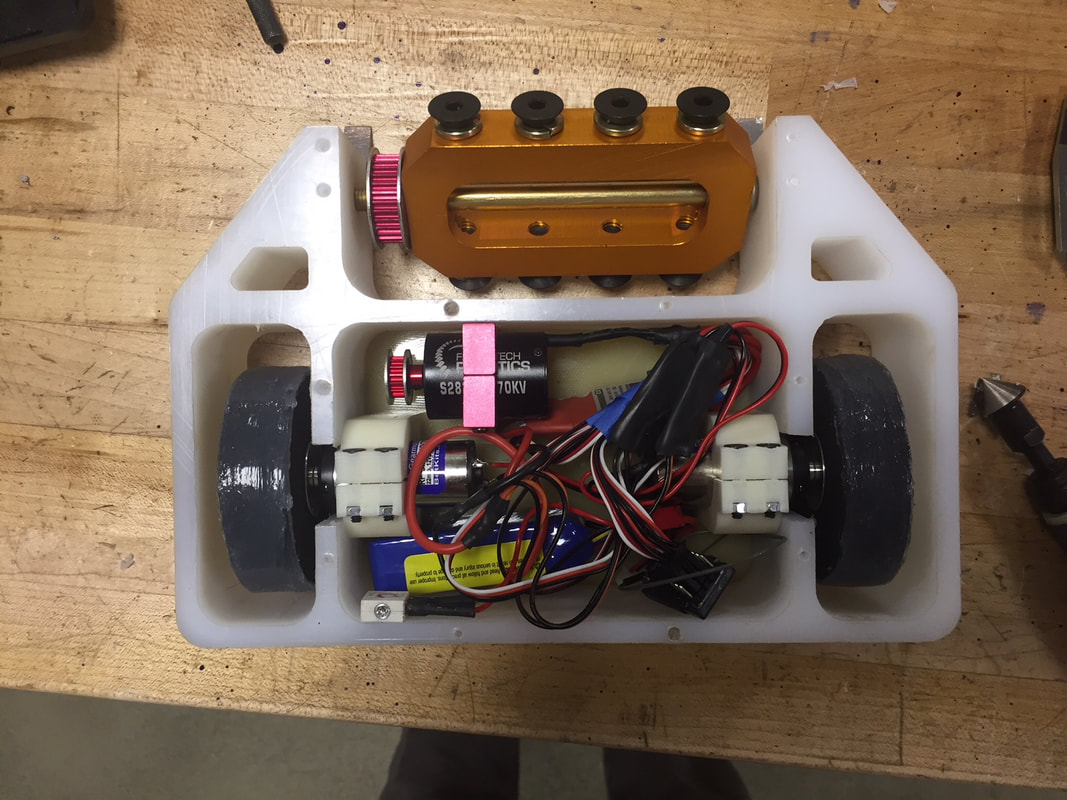
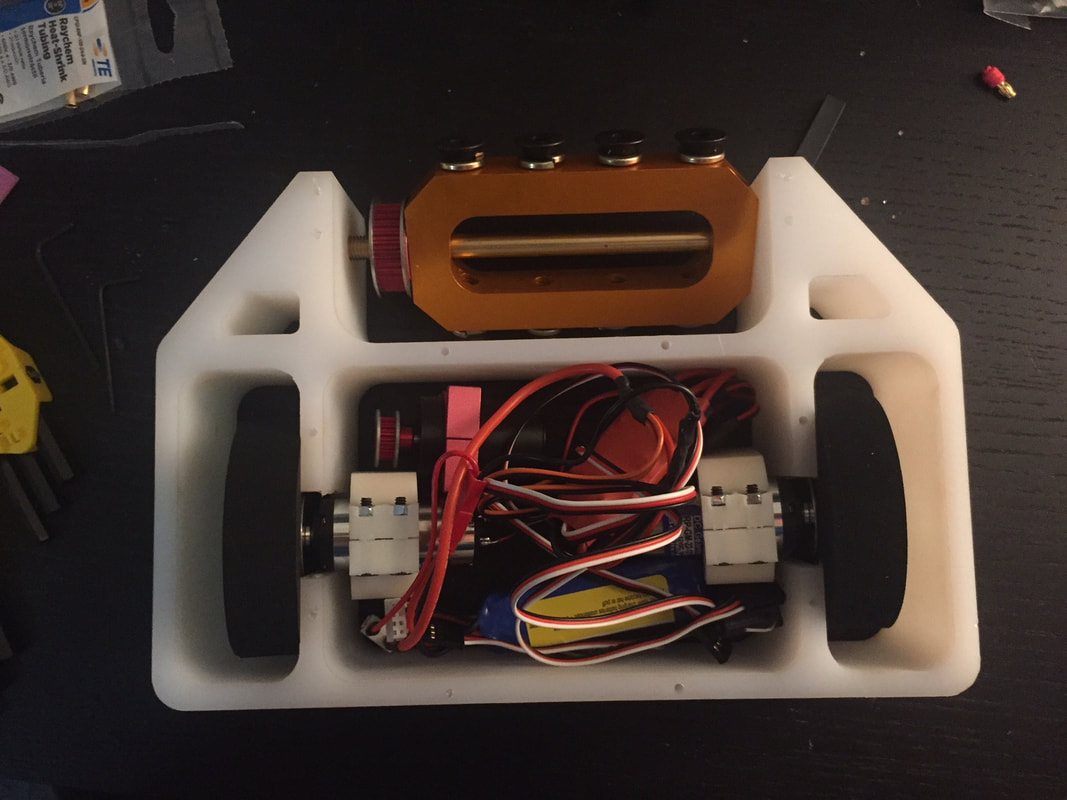
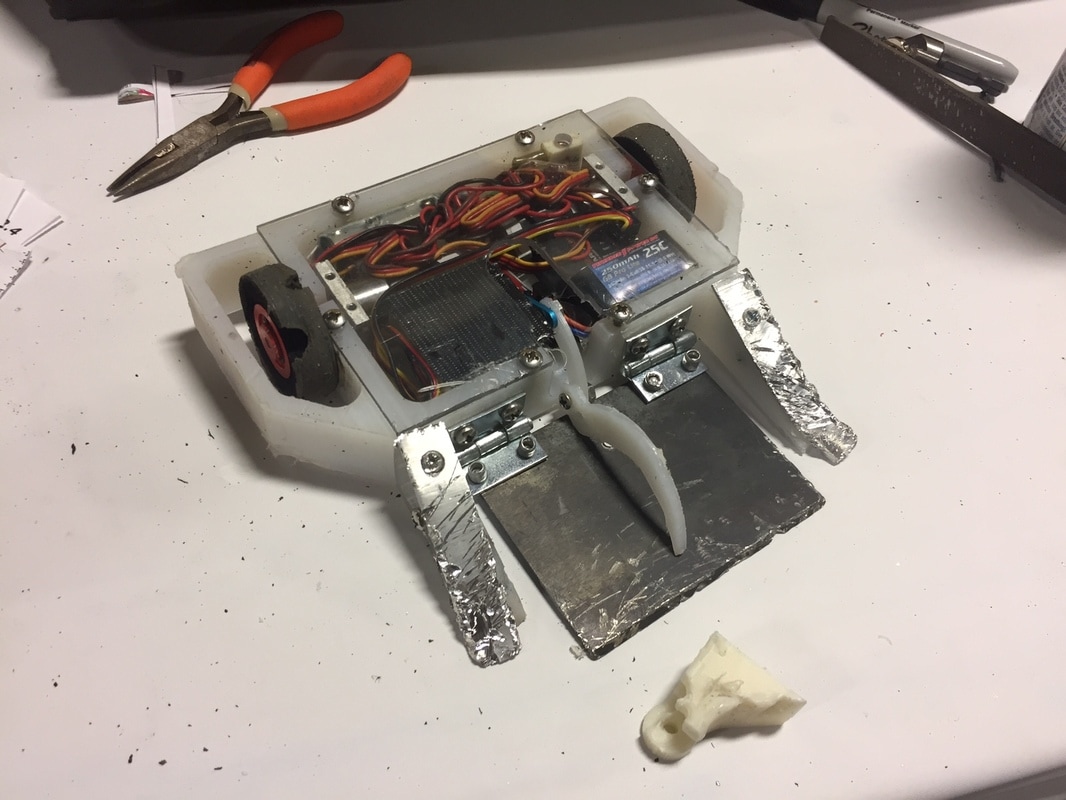
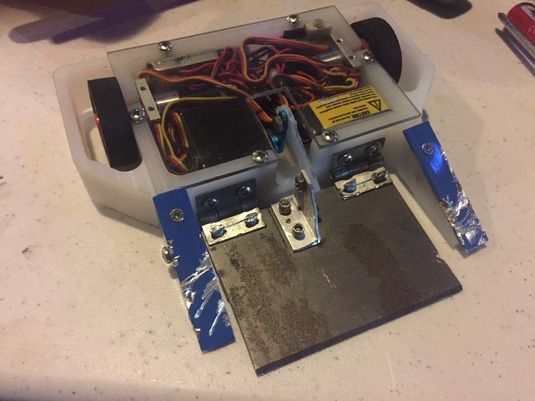
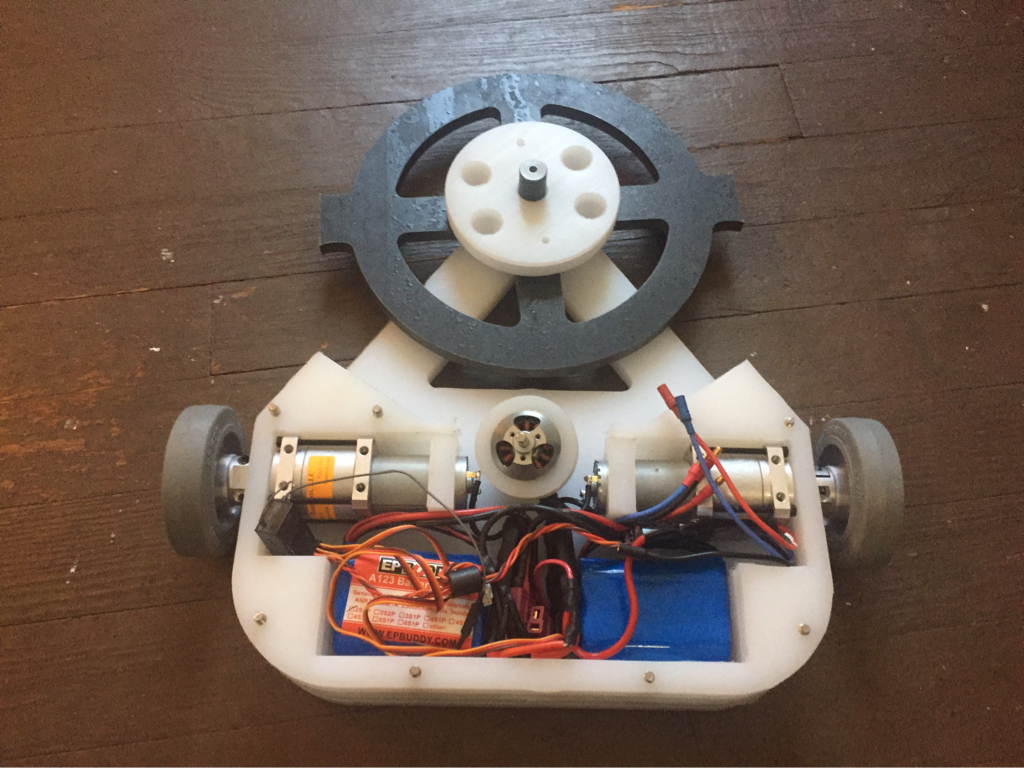
It's not the prettiest, but the interior is completely finished. Everything wired correctly and mounted. I might put some foam in here to "shock mount" the electronics, but everything besides the battery is pretty light so I'm not too concerned about it.
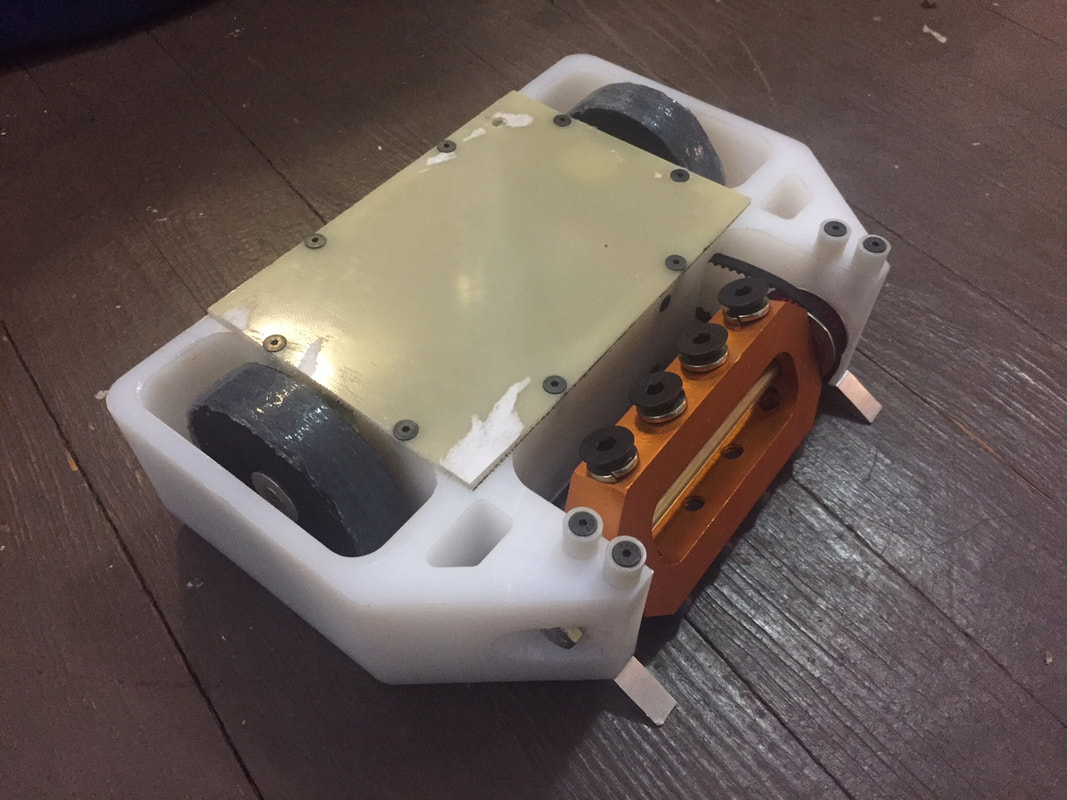
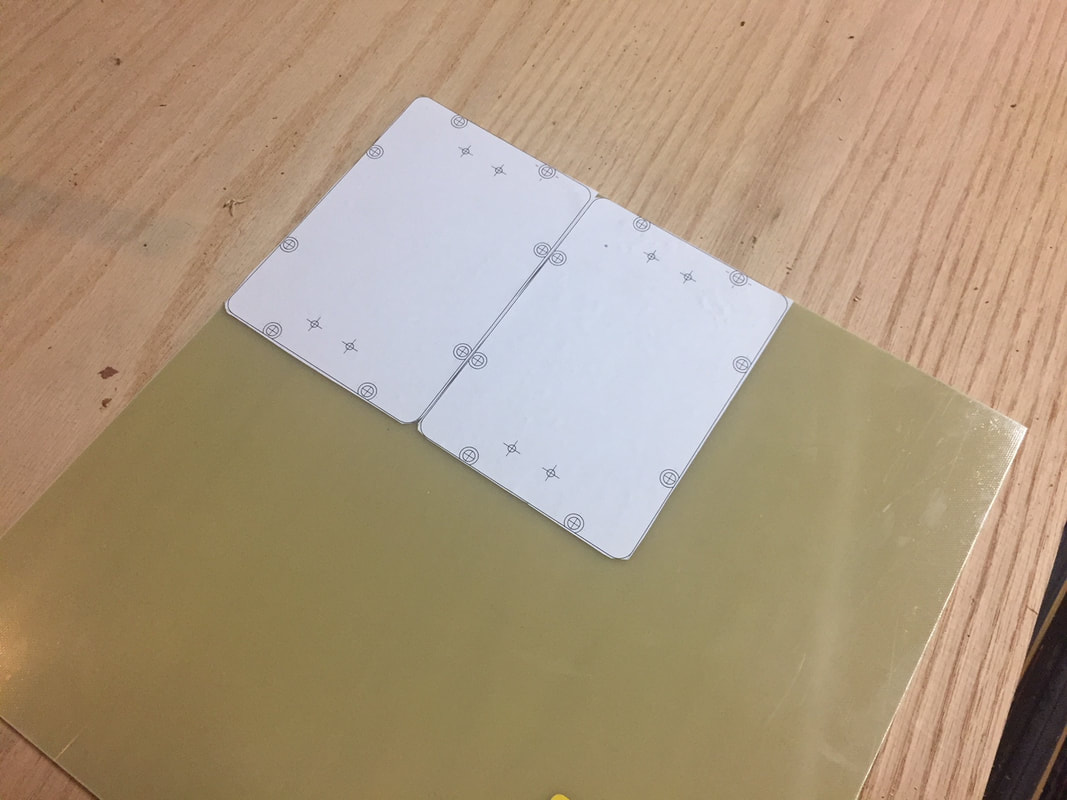
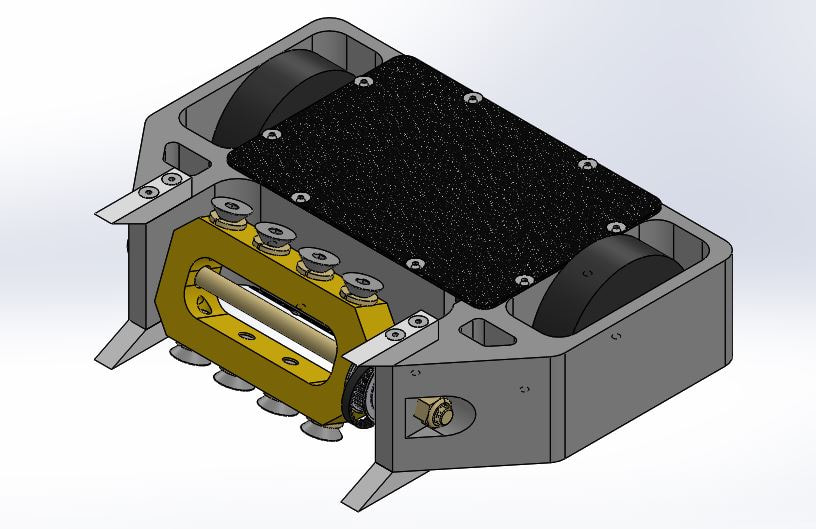
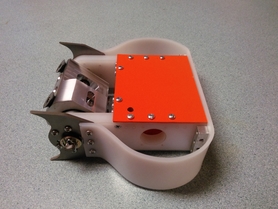
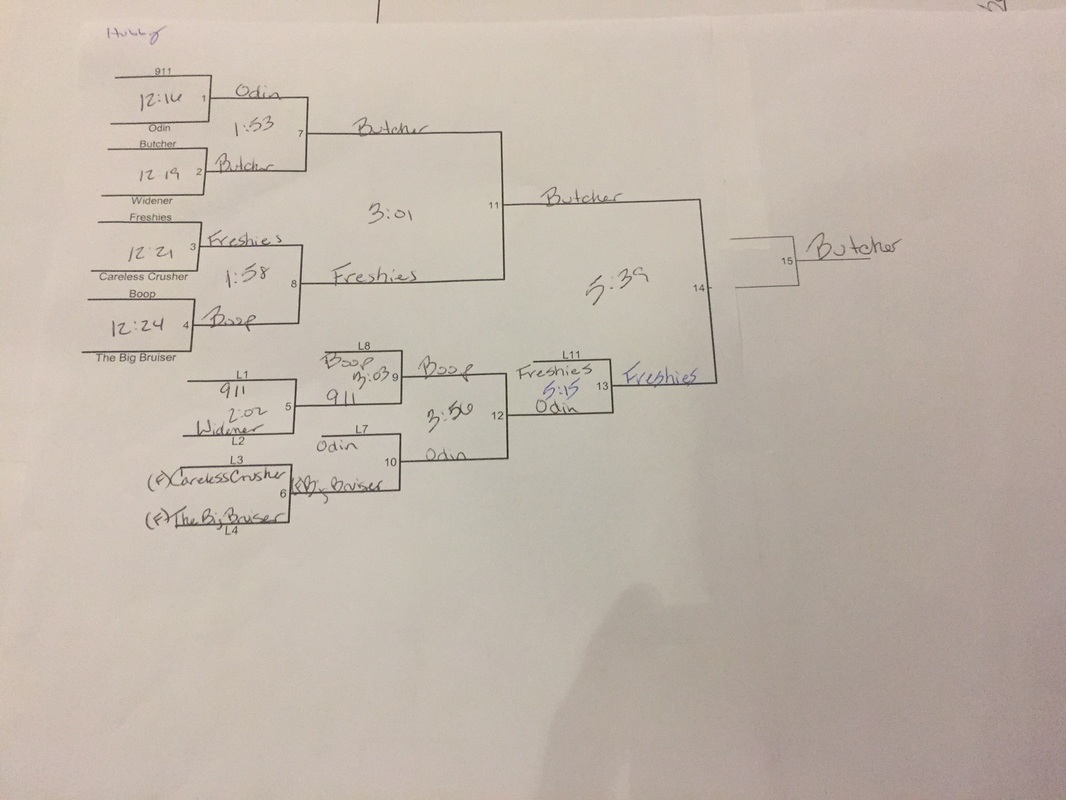
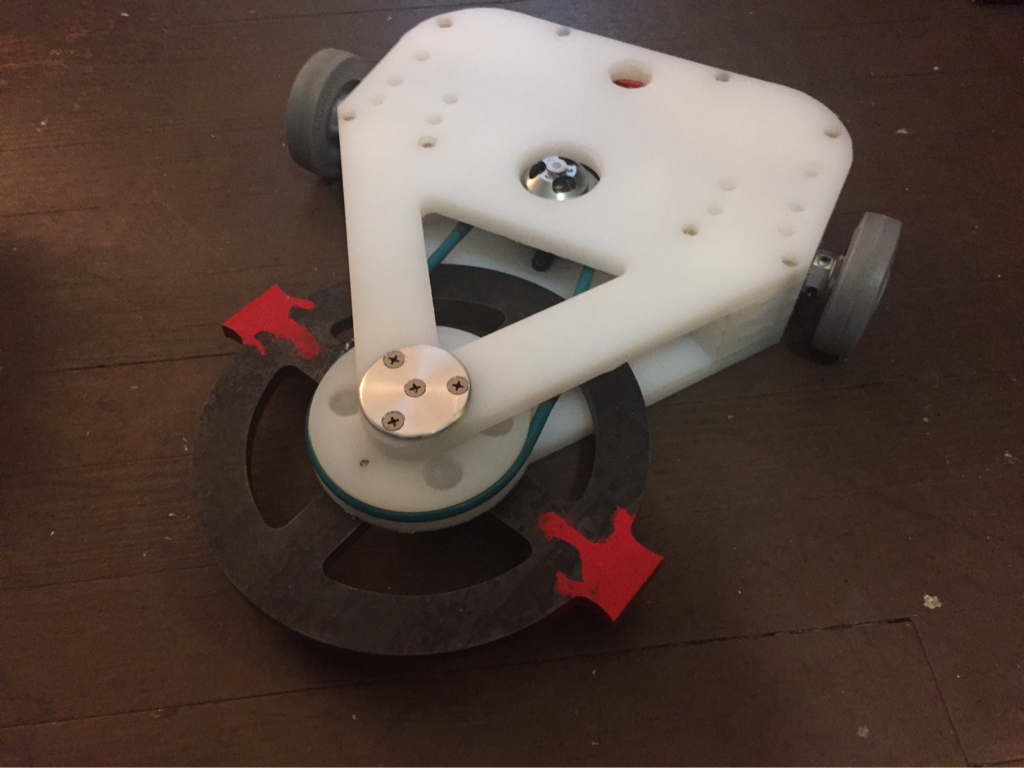
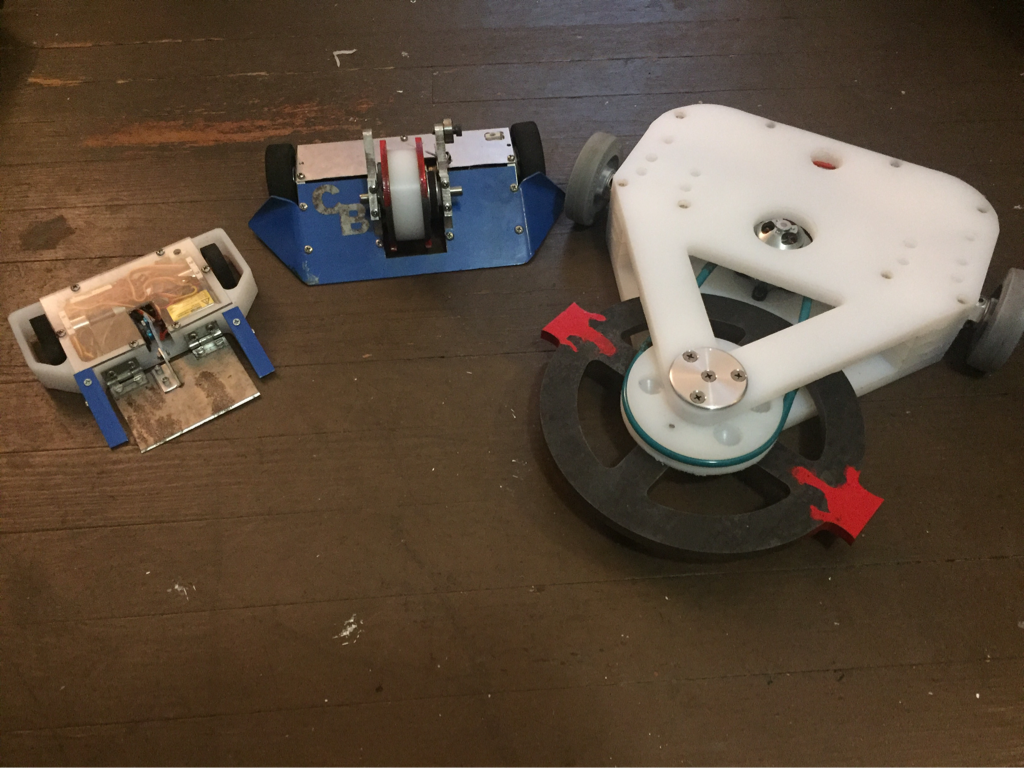
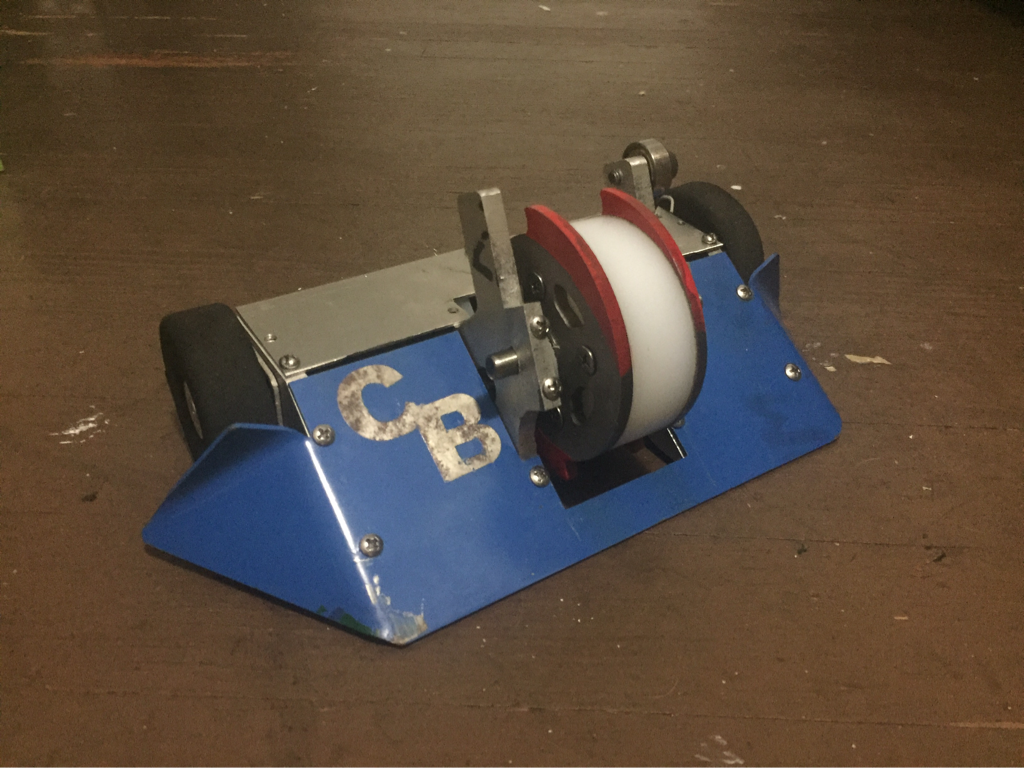
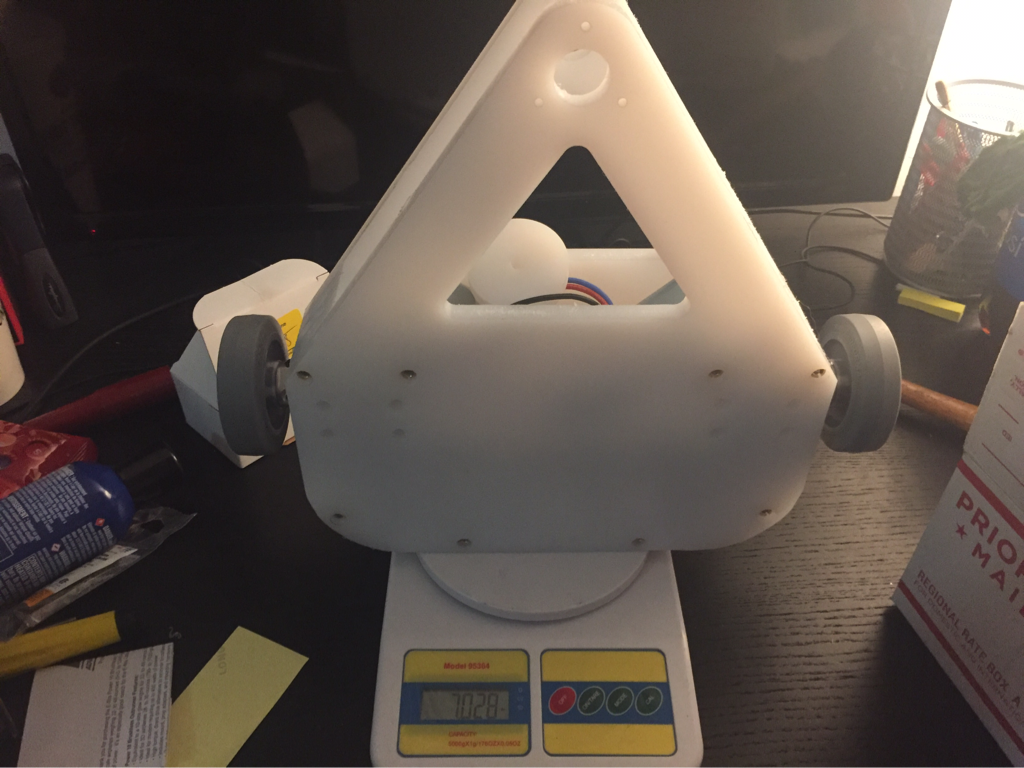
El Tigre as it sits now. I added standoffs to the top so the drum doesn't hit the ground if it gets flipped over. The only things left to do now are to get a properly sized belt, clean up the top plates because they still have paper on them from layout, and probably give it a paint job.
As it sits right now it weighs exactly 48oz (3lb). I'll need to do some driving tests with the weapon running to verify that I won't need a bigger battery. If I do, I'll have to find some weight somewhere, but I'm really happy with where it is at the moment.
I was hoping to get registered for Motorama again this year, but registration filled up in 3 minutes! So hopefully I'll get in through a wait list. Otherwise I'll find a more local competition to try this out on.
As it sits right now it weighs exactly 48oz (3lb). I'll need to do some driving tests with the weapon running to verify that I won't need a bigger battery. If I do, I'll have to find some weight somewhere, but I'm really happy with where it is at the moment.
I was hoping to get registered for Motorama again this year, but registration filled up in 3 minutes! So hopefully I'll get in through a wait list. Otherwise I'll find a more local competition to try this out on.























 RSS Feed
RSS Feed
