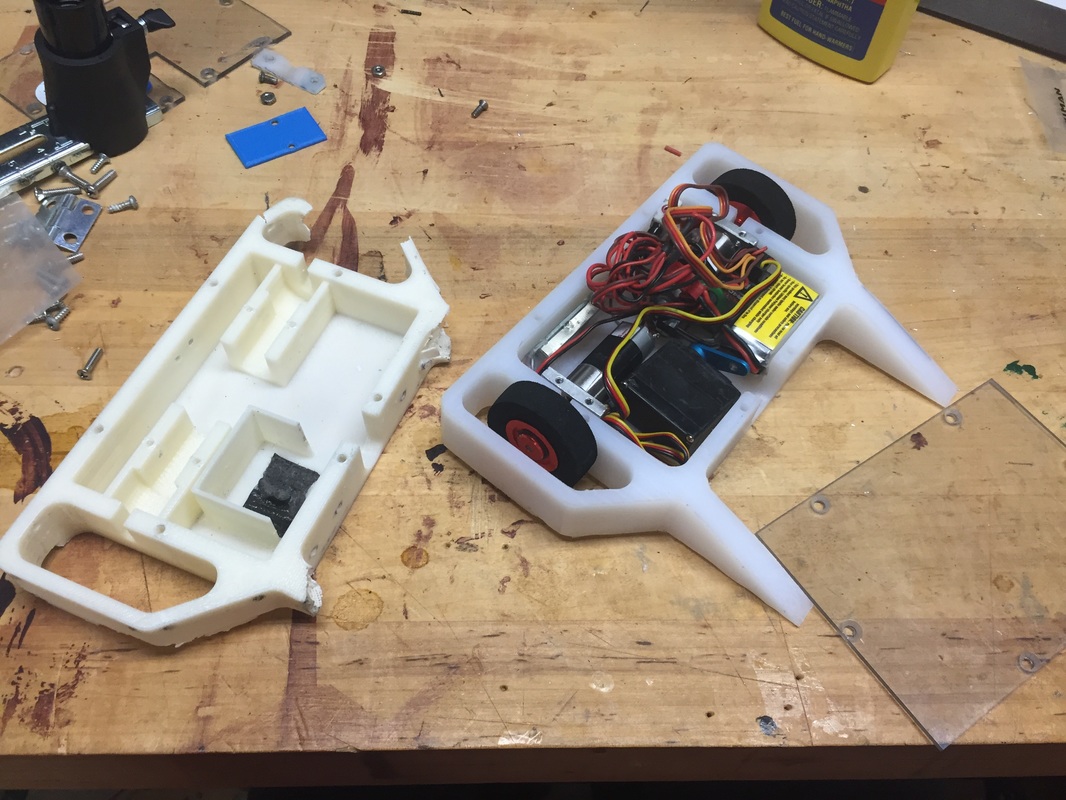
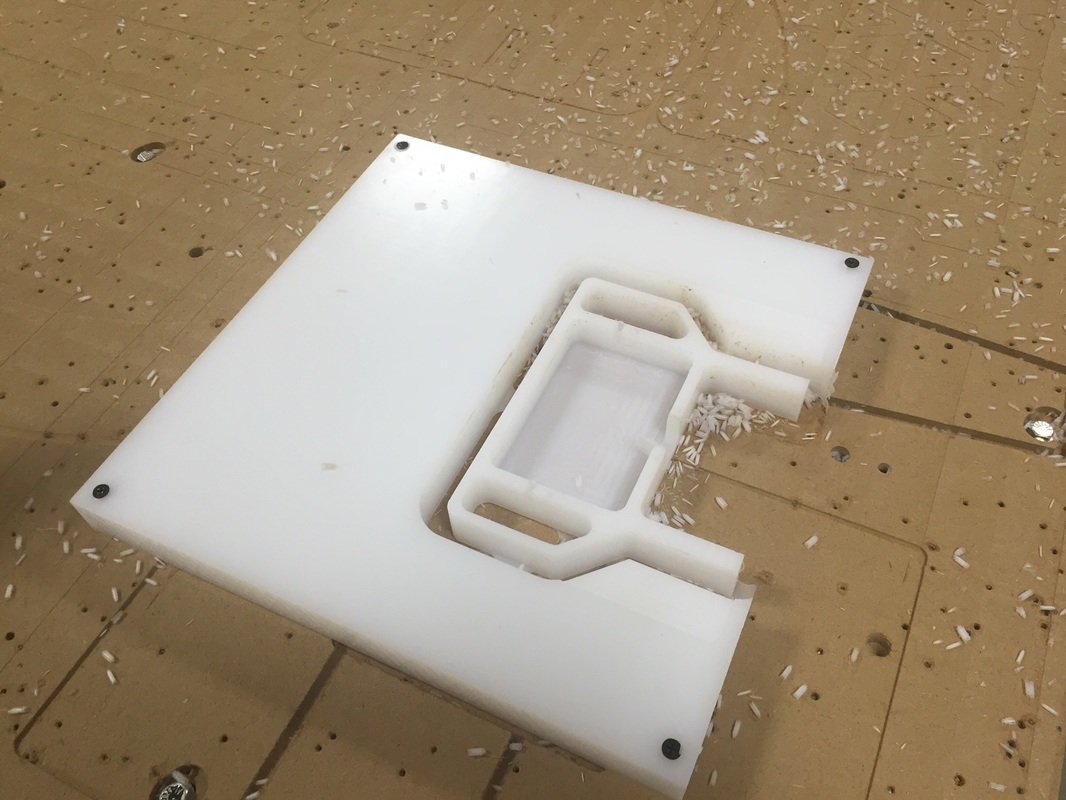
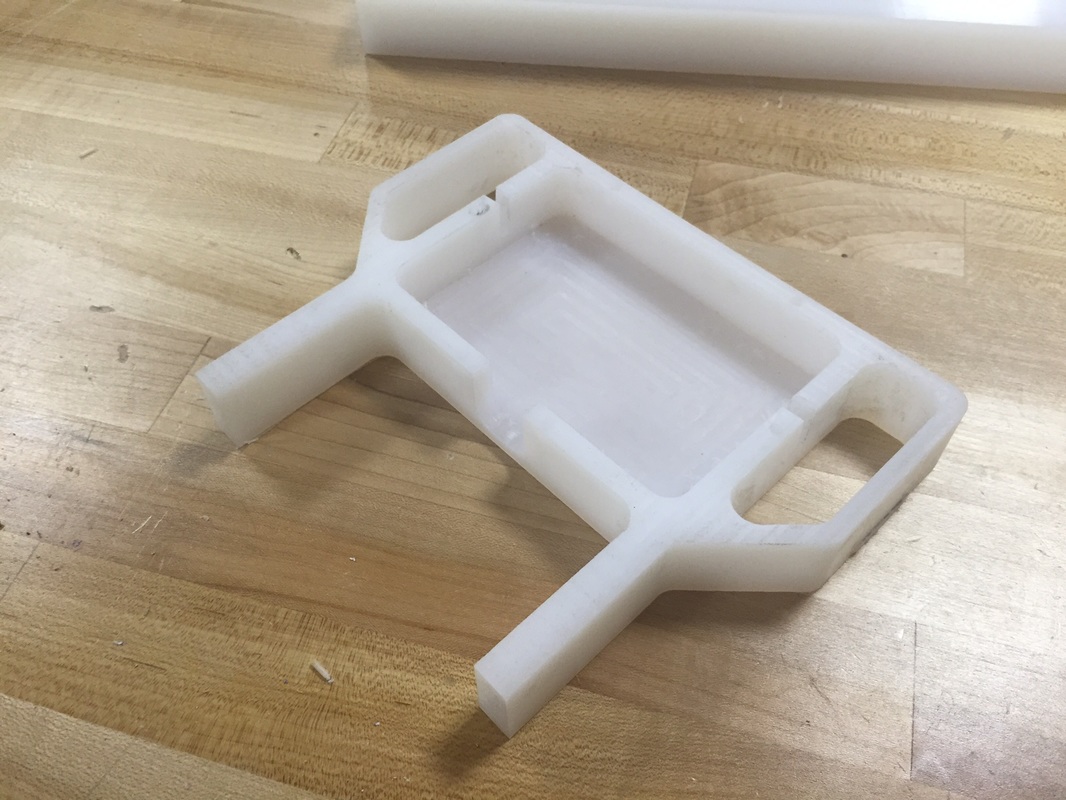
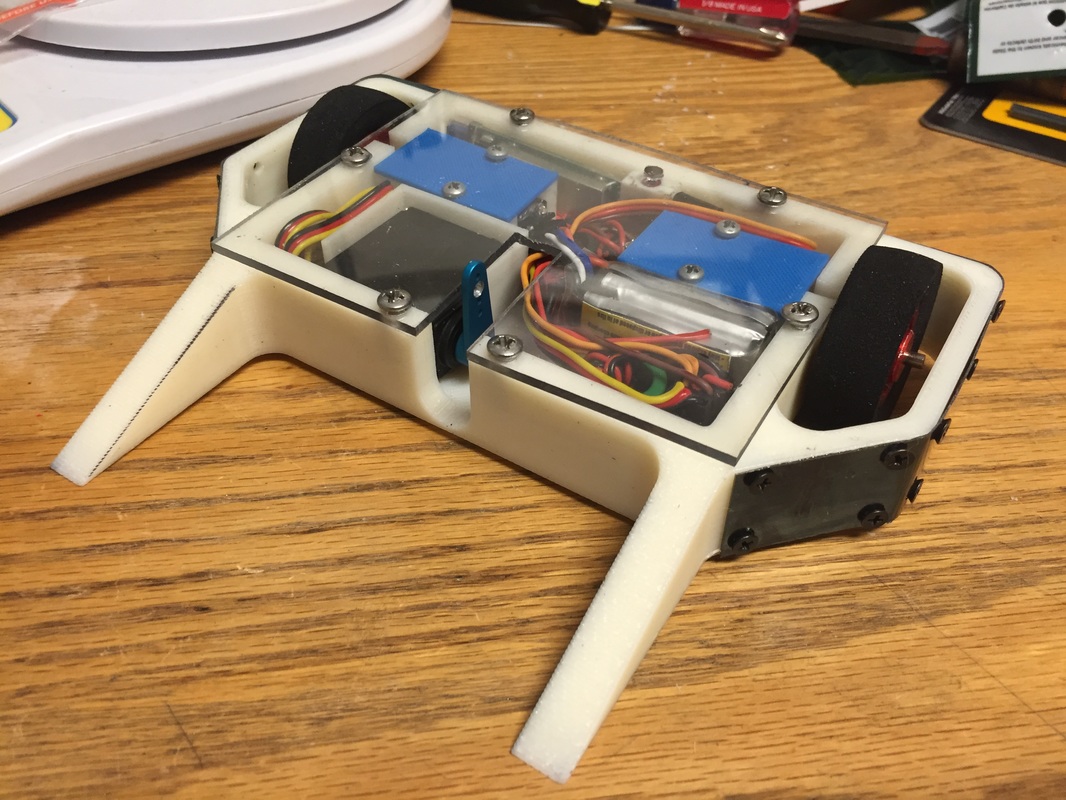
  For the next evolution of Hercules, I am sticking with the unibody design, but changing materials. The newest body is cut from a 1" thick sheet of UHMW using a ShopBot CNC router.
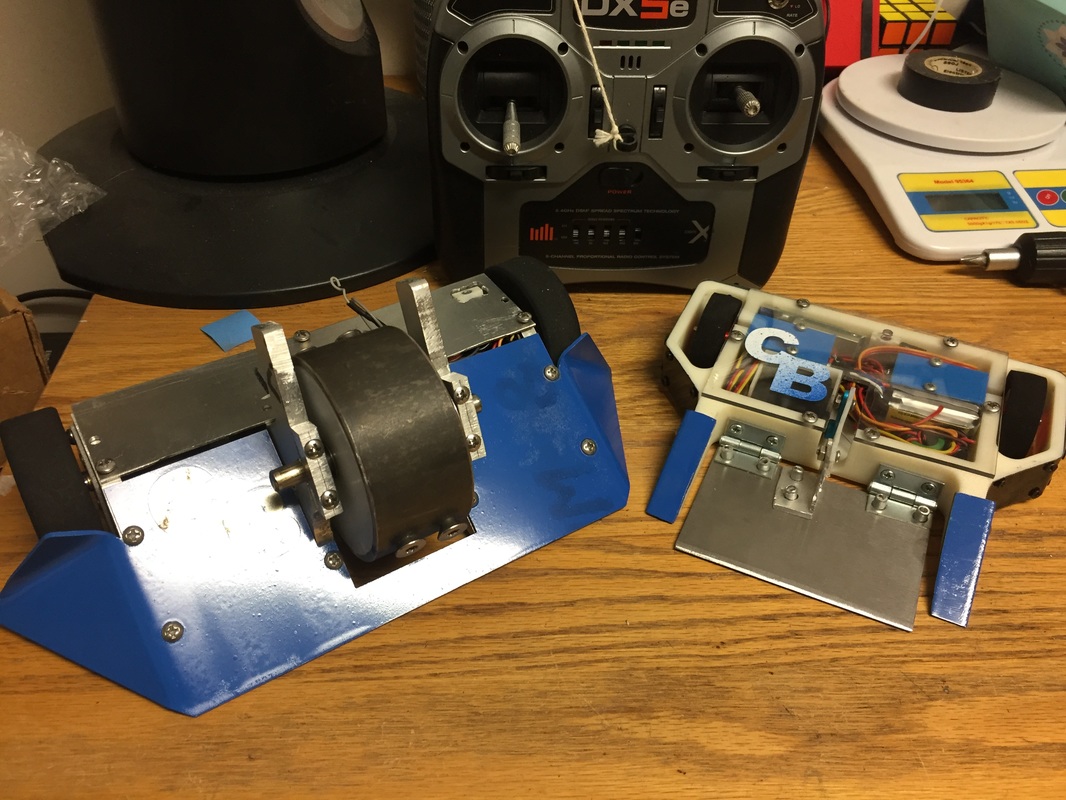
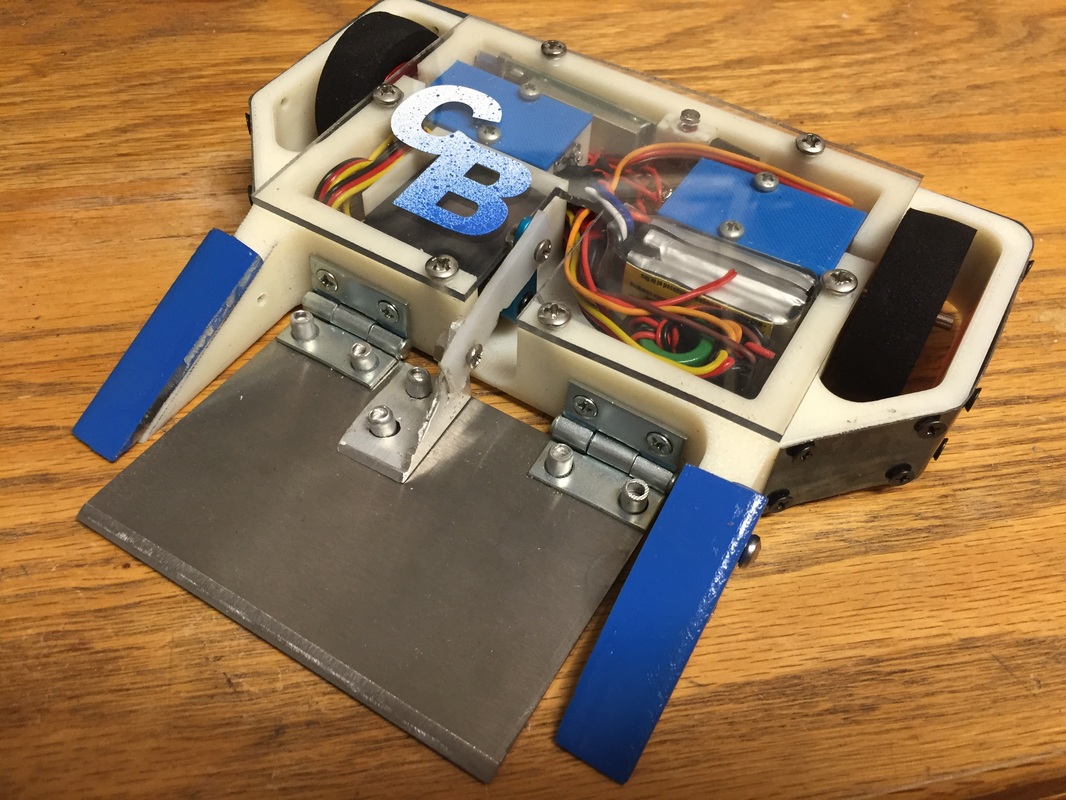
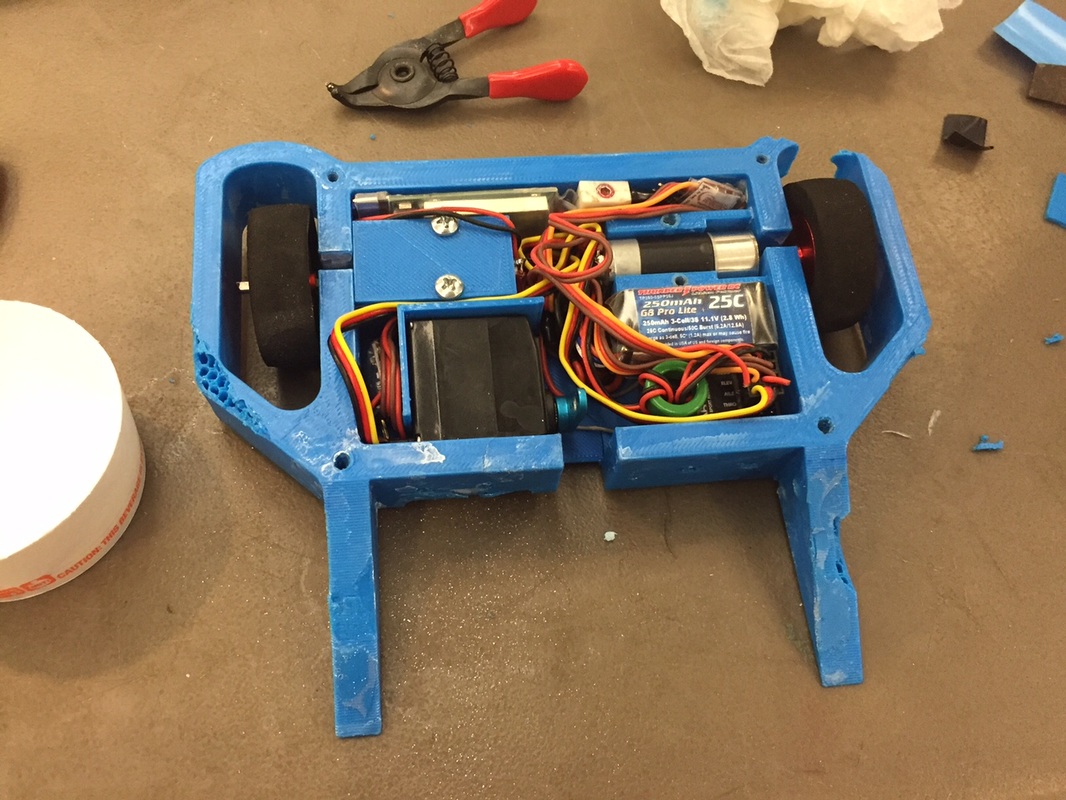
Hercules This past weekend Conn Bots traveled to Harrisburg PA for the annual NERC Motorama Robot Combat event. Being the day before the main event we spent a few hours helping to set up the main arena. Eventually we were far enough along to start weigh-ins and safety checks. Hercules weighed in at exactly 1lb 0.0 ozs. All together there were a total of 18 ant-weights registered. Fights started around 2pm Hercules vs The OphidianFor it's first fight, Hercules was to face the robot that knocked it out of the bracket last year, The Ophidian: a Fingertech Viper Kit with the spinning blade attachment from Team Revelation Robotics. I was slightly worried facing a spinner as my first opponent, not knowing how the new 3D printed ABS body would hold up (especially considering last time). Luckily for me, after box-rushing The Ophidian, his blade stopped spinning, leaving it to a shoving match that I was sure to win. Hercules won on a judges decision while sustaining only minor scratches.  Hercules vs DDTFor all of the competitions that Jamison and I have competed in together over the years I have had Hercules, I had yet to face him until this day. Going in I was slightly more confident knowing that Hercules had held up against a decent horizontal spinner in the Ophidian, but this was different. DDT is the most powerful 1lb horizontal spinner I have ever seen in action. The first big hit between the two tore off one of the steel wedge guards on Hercules. Hercules held up pretty well to most of the hits, only losing small pieces here and there. Jamison got in a few good hits that broke off both extensions that help Hercules lift other bots reducing it to a push bot. Hercules lasted the full 2 minutes and made it to a judges decision but lost decidedly to DDT. 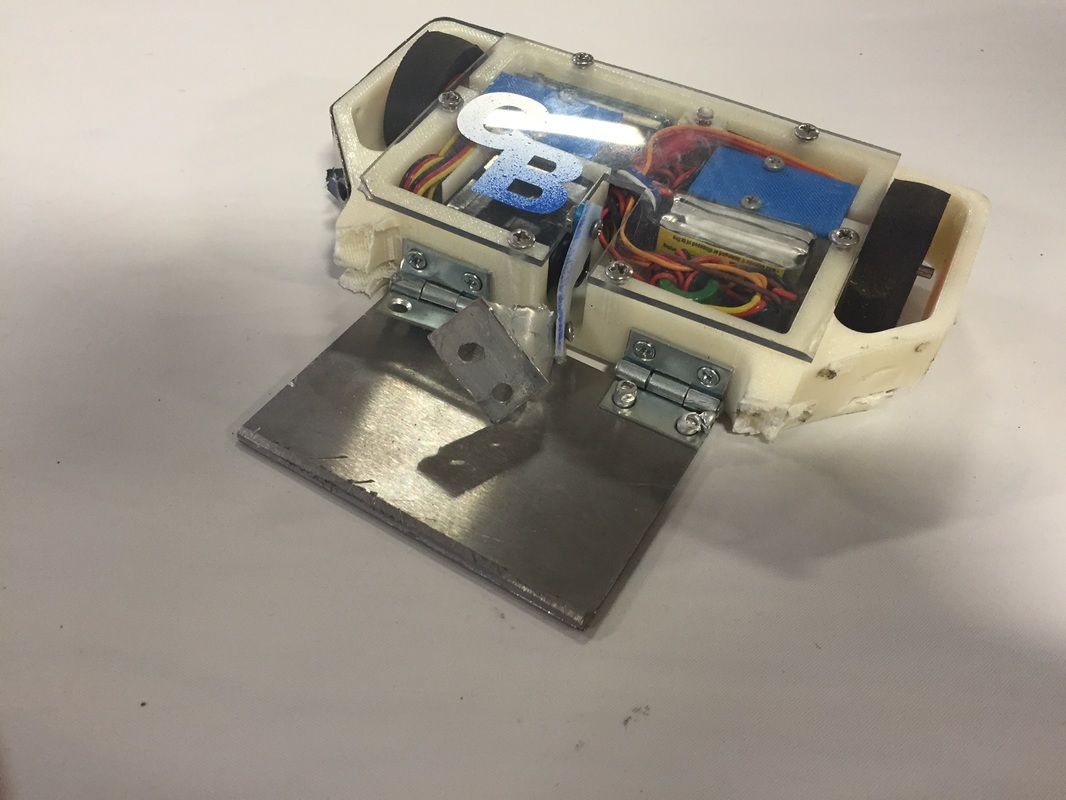 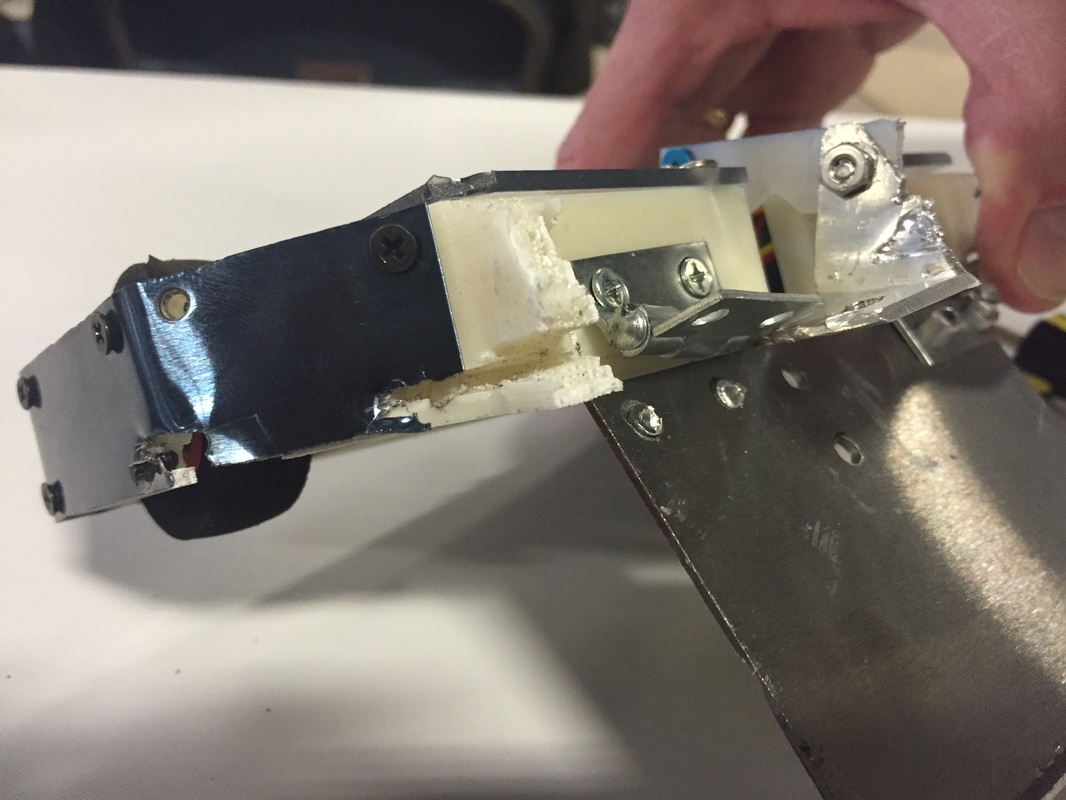 Despite the severe damage that DDT doled out I was happy with how Hercules held up. Part of the problem was the fact that DDT's blade was the exact same height as the screws I had put in place to hold on the spring steel covers for the wheel guards. This resulted in Hercules losing its left steel cover. The second picture above shows the power that DDT has in that blade. It sliced through .02 in spring steel, tore our a black oxide screw, and tore through 3/8" of ABS to bend the hinge on the lifter enough to disable it. Hercules vs Kate the RatAfter dropping to the loser's bracket thanks to DDT I had to try and make some repairs. I re-riveted on the lifting plate with new hinges and expoxied one of the arms back on. Hercules's next fight was against Kate the Rat, a 4WD pushbot with lots of speed. Using what was left of Hercules to push around Kate the Rat I won on a judges decision but lost the arm I glued back on in the process. Hercules vs BuzzAfter a long wait due to postponements, Hercules's 4th fight of the day was to be against the drum spinner of Buzz. Hercules has always struggled against vertical spinners (see Hercules vs Algos). And although I probably would've been fine running right-side-up, since I had lost the arms already, I decided to err on the side of safety and run Hercules upside-down as a wedge. This wasn't the best decision, as you can see in the video, because I got stuck a couple of times and had to readjust the angle of the lifter to get better traction after a hit. A little pushing and shoving here and there, mostly going my way. Buzz ran into the wall about half way through and broke his weapon motor. This gave Hercules the advantage to keep pushing him. Buzz eventually got stuck in the crack between the wall and the floor, but showed enough movement that I had to keep fighting him, leading to Hercules getting stuck in the gap. In the end Hercules would win in a judges decision. Hercules vs Vile AntFor it's fifth (and final) opponent of the day Hercules would face another brutal horizontal spinner, Vile Ant. Going into the fight, I didn't have high hopes. Hercules was on its last legs, and another high KE spinner was the last thing it needed. Almost immediately, Vile Ant finishes what DDT started and rips off the other steel wheel guard, followed closely by the ABS underneath it. Hercules kept fighting, and made it all the way to a Judges decision. It ended in a split decision for Vile Ant who would later advance to the finals against Algos 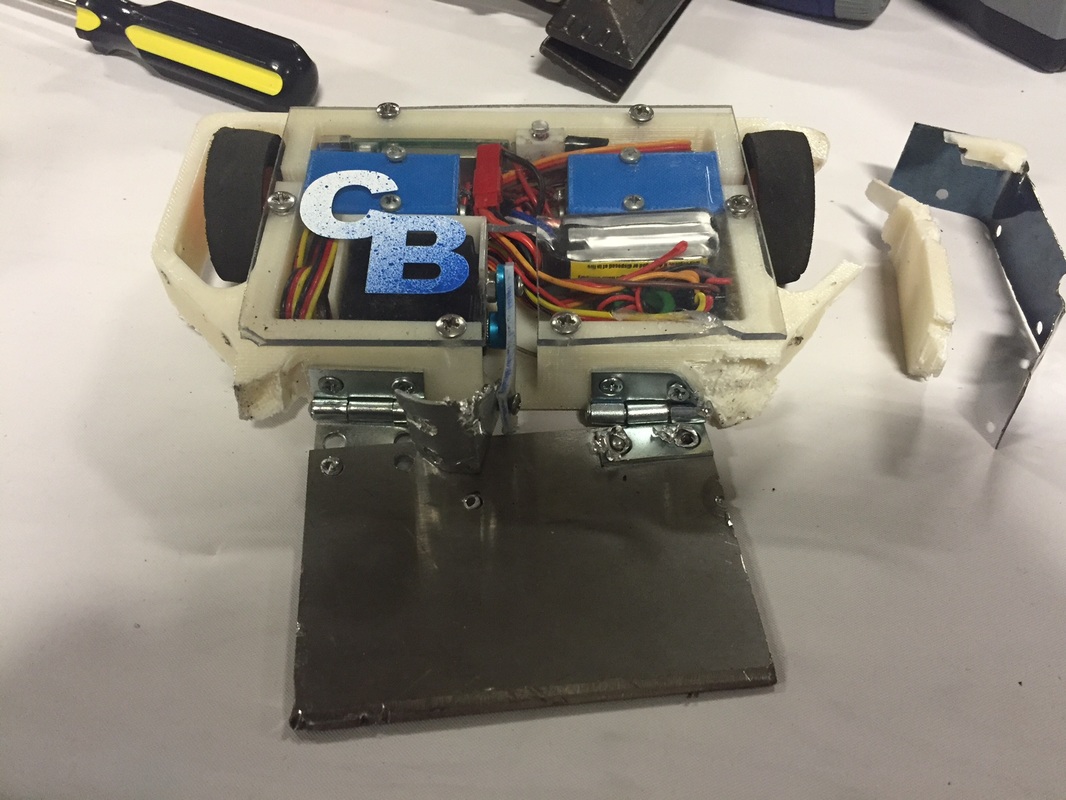 After its bout with Vile Ant Hercules was pretty shredded: Missing 2 arms, 1.5 wheel guards, 2 gearboxes barely attached to their motors, and a barely working weapon. In the end though, I'm very happy with how it performed, getting to the final 6 of a field of 18 and being the only non kinetic energy bot to do so. 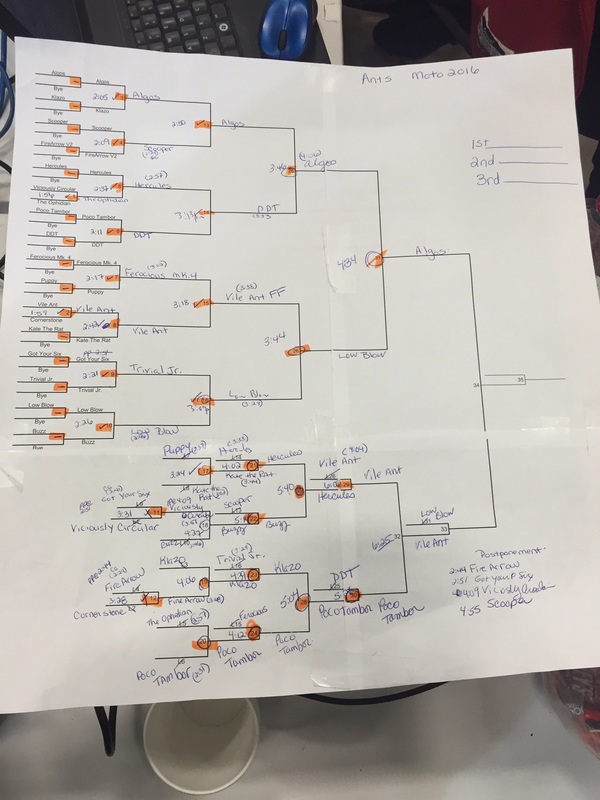 Thoughts for the Future: Although this version of Hercules did much better than the previous blue PLA version, I think that it is time to give up on 3D printing (at least for this bot). Even the Markforge Carbon Fiber/ Kevlar impregnated Nylon that Jamison uses has the same toughness (ability to absorb energy) as the UHMW that Hercules originally used. While 3D printing has its place, this design, because of its reliance on the two front arms to balance the lifter, is not suited for it. For the future I plan on abandoning a 3D printed unibody in favor of a CNC milled UHMW unibody. I believe this will provide Hercules that toughness that it needs to face the massive amount of spinners out there. Barrel RollI'm really at a loss here. I thought I had fixed it, I really did. I went through the steps, replaced everything, isolated the problem and worked to fixed it. Barrel Roll was working before I packed it up and put it in a box to fly to Harrisburg. Friday night I brought it back to the hotel in order to bind it to my transmitter and get in some driving practice before the big day. Unfortunately, the same problems showed up again. Barrel Roll would intermittently get a mind of its own and start spinning in circles, turning the weapon on, or generally doing whatever I wasn't telling it to do.  Barrel Roll vs Super VeloceAfter the driver's meeting I was less than optimistic. I had spent hours the night before in my hotel room trying to fix the same problem that I had spent 2 weeks on prior and still not solved. I tried what I could in the pits but it wasn't enough. Barrel Roll still was being rebellious. Fortunately for me it was to face the wedge of Super Veloce; unfortunately it was driven by Ian McMahon, a very good driver, and I was barely able to drive. At lest I knew I wouldn't get destroyed.  This actually went a little better than I was expecting. Super Veloce was able to get under me for the most part but I was able to get in a few good hits for the portion of time I was actually in control. You can see a couple of times in the video where I completely lose control and Barrel Roll starts spinning in circles. At one point it even drives itself off camera and into the arena wall. The good news is that the weapon actually works pretty well. Hitting the wall too many times busted the bearings but I had spares so that's not an issue. The bad news was that without having control of the bot I was unable to maneuver to hit my opponent and was basically at the mercy of my opponent. All of that uncontrolled spinning in circles lead to one of the wheels coming loose. All of that lead to Barrel Roll losing a decisive judges decision and dropping to the losers bracket. Barrel Roll vs QuicksandEven after more tinkering in the pits Barrel Roll still wasn't working right. I had conceded to the fact that I wasn't going to get control of the bot without taking it all apart and reevaluating the electronics setup.  Barrel Roll struggled even more in this fight. I was barely in control. Once it got knocked on its back, the sporadic movements became even more of a problem. I'm going to have to go back and take out the entire electronics system to be able to fix this problem. It has to be some kind of interference with the ESCs/receiver. Luckily the entire body is unscathed so it's only electronic issues I have to fix.
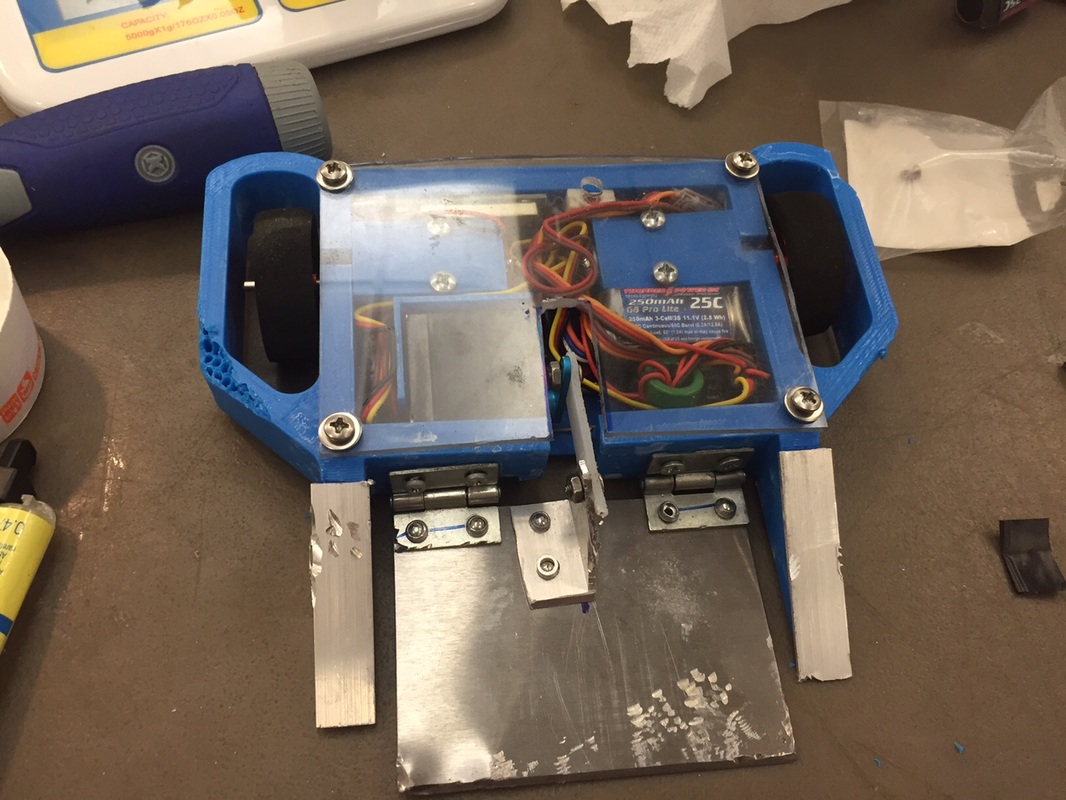
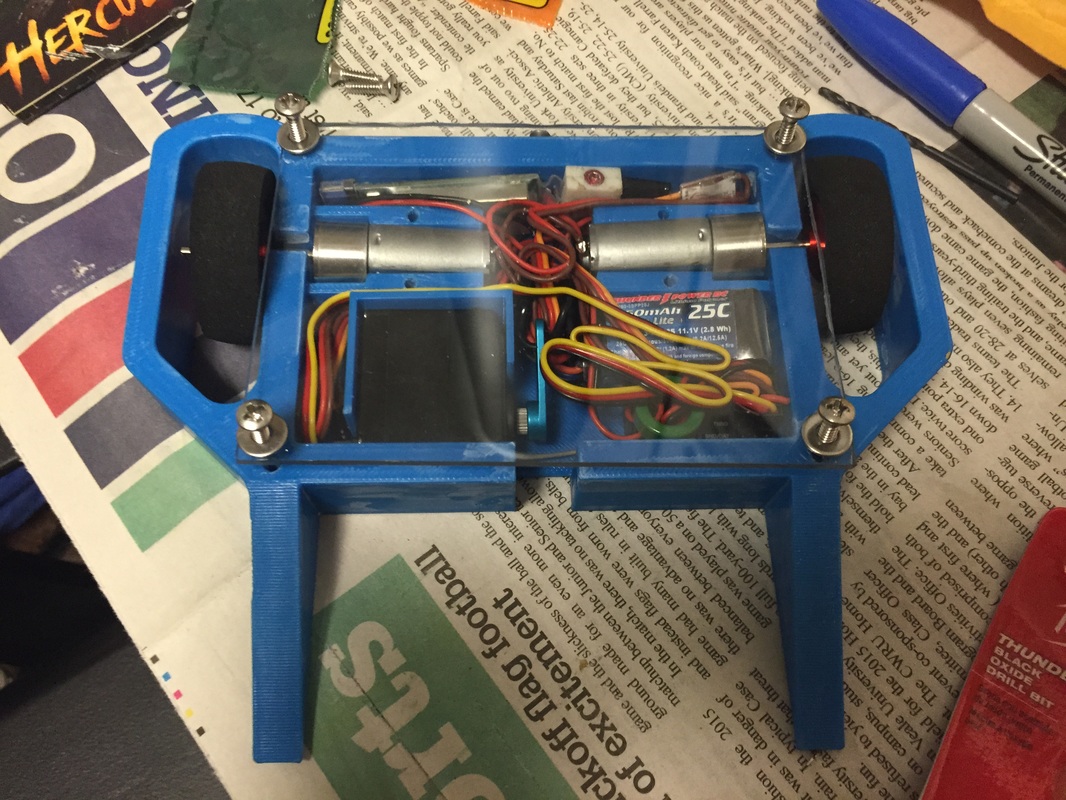
All in all I'm pretty happy with how I did at Motorama 2016. Hercules performed great and is only going to get better. Barrel Roll, while it has its issues that need to be worked out, finally showed some potential in the small amount of time that it was working properly. I have some time until my next competition which will probably be sometime this summer if I am able to get enough done while in Wisconsin for my internship. Until then I have plenty of things to work on. After Franklin Institute Hercules was pretty banged up. With a record of 1-2 and that win coming from a forfeit I was less than happy with how it had performed. The biggest problem that it had was the body, being printed out of PLA, was way too brittle for combat applications. To fix this I printed the new body in ABS, which I had originally planned to do but simply ran out of time. 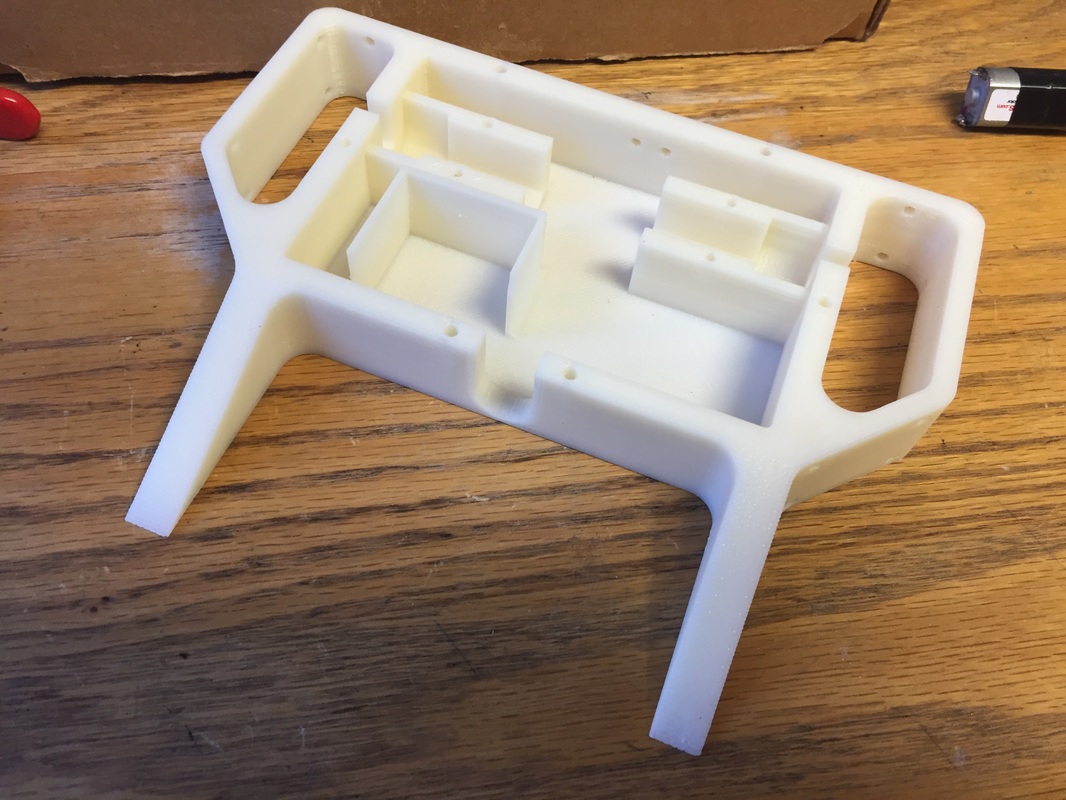 The new body is basically the same as the old one, a few tweaks of dimensions here and there. I moved the mounting holes for the lid away from the corners to help relieve some of the stress from big hits on the front arms. 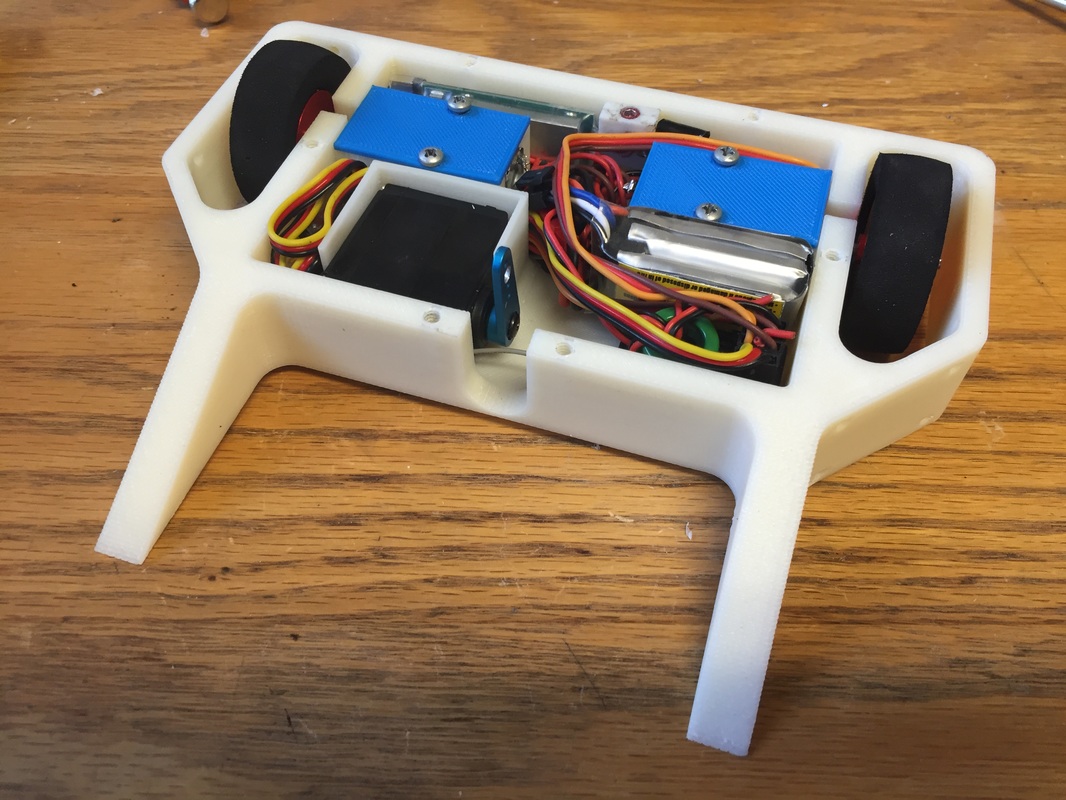 Transferring the electronics from the old Hercules was pretty straight forward. I forgot to print new motor cover plates, but the old ones were unbroken and I liked the blue anyway. One of the major weaknesses of Hercules, especially with the last iteration, has always been wheel protection. As you can see Saifu got a pretty serious hit right on the exposed shaft of one of the motors after the wheel guards had been shattered, bending it out of shape. To combat this, I took advice from "the kids from MIT" and wrapped the wheel guards in a layer of .02" spring steel. This should help absorb big impacts and prevent the wheel guards from breaking as easily.  After adding the new lifting plate all I had left was the arm guards, but after weighing it I discovered that Hercules had about 1.75oz to spare. The old aluminum wheel guards weighed only about .5oz so I figured I would use the extra weight to upgrade to steel. 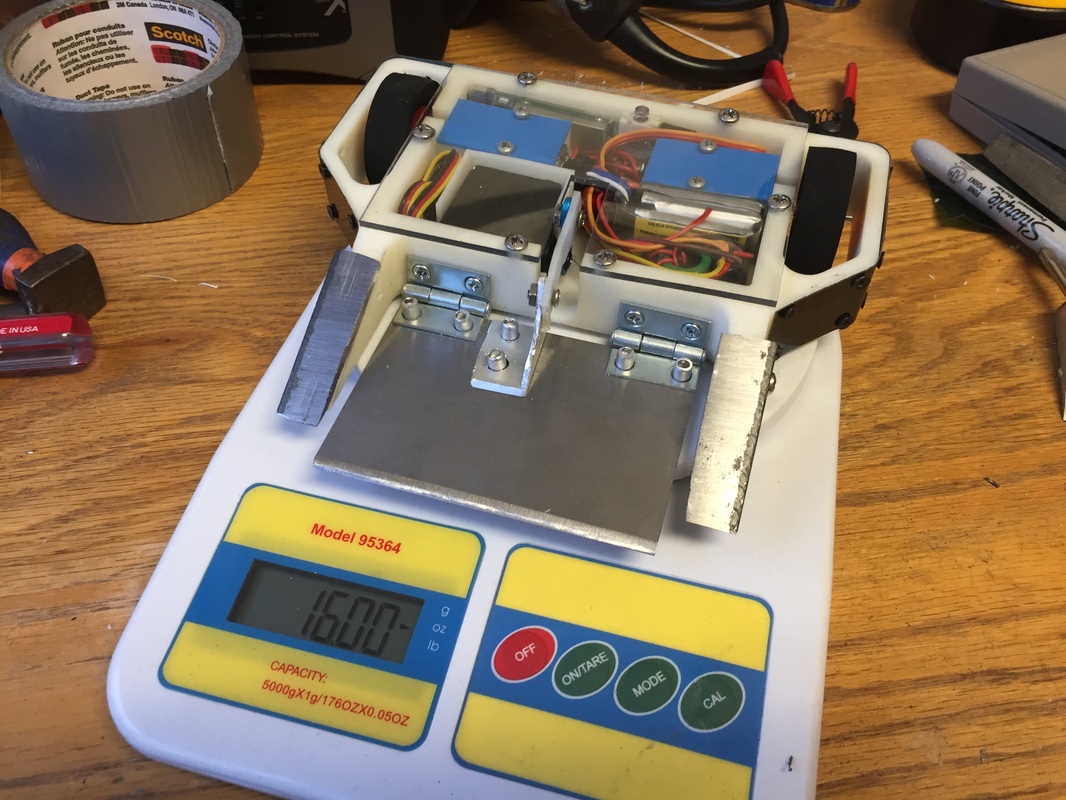 Well, I may have gone overboard a little with the steel. It's definitely way thicker than it needs to be. But after some careful trimming Hercules is now exactly 16oz (according to my scale at least). If I'm overweight on Motorama's scale I can remove some screws and drill some holes in the steel and I should be fine. With both of my bots done, all that is left is a cool new paint job.
Over the past weekend I packed up my car and drove the 6+ hours from Cleveland to Philadelphia for the annual NERC Franklin Institute event. After having a summer of working and not being able to get away for robotics it felt good to be back. This time I only had enough free time between school and other activities to bring Hercules, my antweight lifter. I found out that Hercules was pretty underweight (only 13.7oz of the allowed 16oz) which was mostly due to the fact that I had to print the body in PLA instead of the ABS that I had originally wanted because ThinkBox didn't have their ABS 3D printers ready since they recently moved locations. Hercules being underweight really wasn't my main concern though. I worried that the PLA would be too brittle to stand up to the rigors of robot combat, and my worst fears were realized in my first fight. Hercules vs. RevyRevy was the newest in the line of Kitbots combat robotics kits, an antweight vertical spinning drum, built by Brandon Nichols of Team Headbangers. Hercules was to fight Revy as the first fight of the event. I knew that I was in for a tough match that would require perfect driving especially since I was worried about the brittleness of the frame. 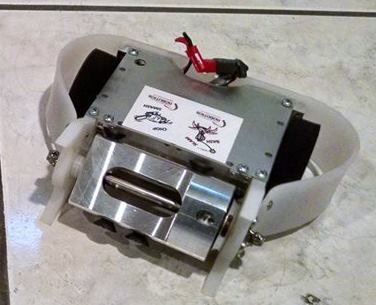 The first half of the match went just as I had planned. I kept getting under Revy and besides from one big hit there really hadn't been that much damage done. That all changed when the lifting plate of Hercules got stuck under the wall of the arena, mostly because I hadn't had much practice driving Hercules seeing as I had finished it 2 days before and it was much faster and harder to control than previous versions. Revy was able to get a good pop in to flip over Hercules. Hercules was reduced to a bad wedgebot and could do little to attack Revy. The match ended with Revy hitting Hercules clear out of the arena. Revy had done some decent damage to Hercules, especially that last hit. But with a little acetone and super glue I managed to get it back to its original state (kinda). Hercules would drop to the losers bracket to fight another day. Hercules vs Whack JobWhack Job was a hammerbot that had suffered a pretty serious beating in its previous fight and had to forfeit its match against Hercules. Although its not technically a win I'm counting it as a win because I think that even if they were able to fight it out Hercules would've come out on top. Hercules vs SaifuFor its next fight, Hercules was to face Saifu, the original antweight drumbot that the Kitbots kits are based off of. That's right, I basically had to fight the same robot that I had lost to in the first round again, this time with a better driver. Oh well, that's how the tournament goes sometimes.  Although I can't find a video of it, this fight went about the same as the first. Hercules was a little beat up from its first fight so pieces started flying off sooner. Saifu was able to completely tear off the right wheel guard of Hercules and deal a killing blow to that tire, knocking Hercules out of the tournament. 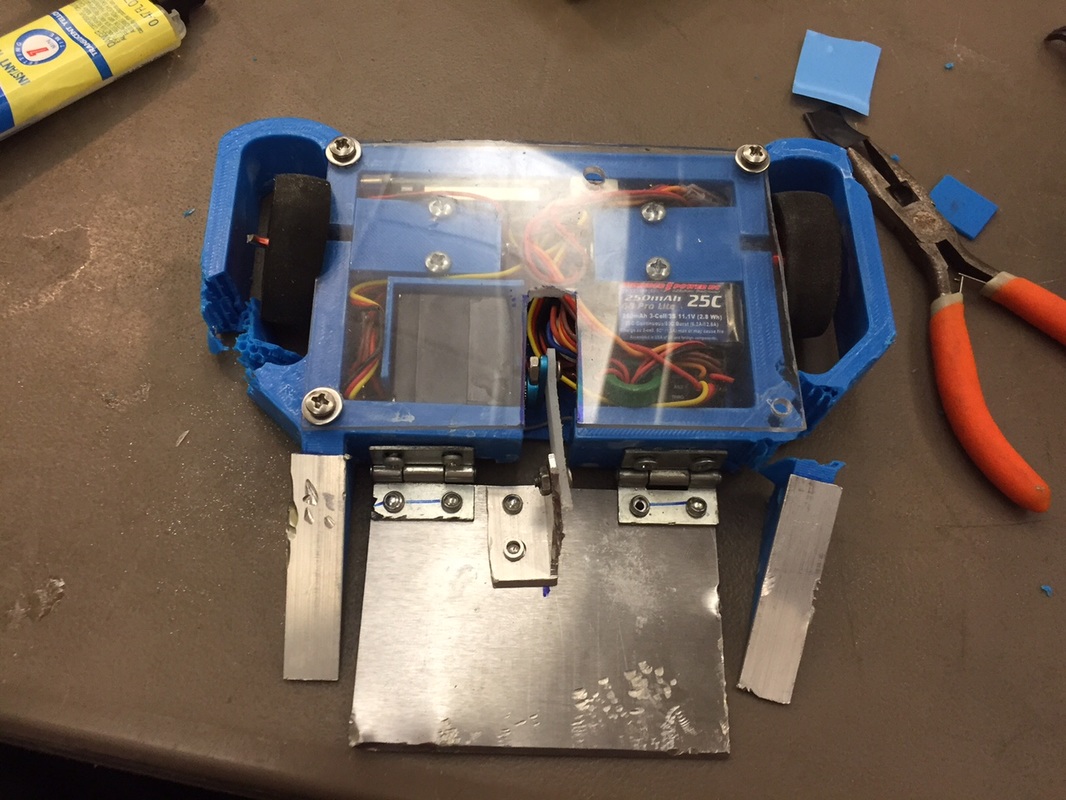 Overall, even though Hercules didn't do as well as I had hoped (1-2 on the day) I was happy. I think that if I can print the next frame of Hercules out of ABS it'll be much stronger and less brittle. I loved the new 11:1 Silver Spark motors from Fingertech and how Hercules was much faster and more maneuverable. I think with some slight modifications to the next version Hercules has the potential to be great.
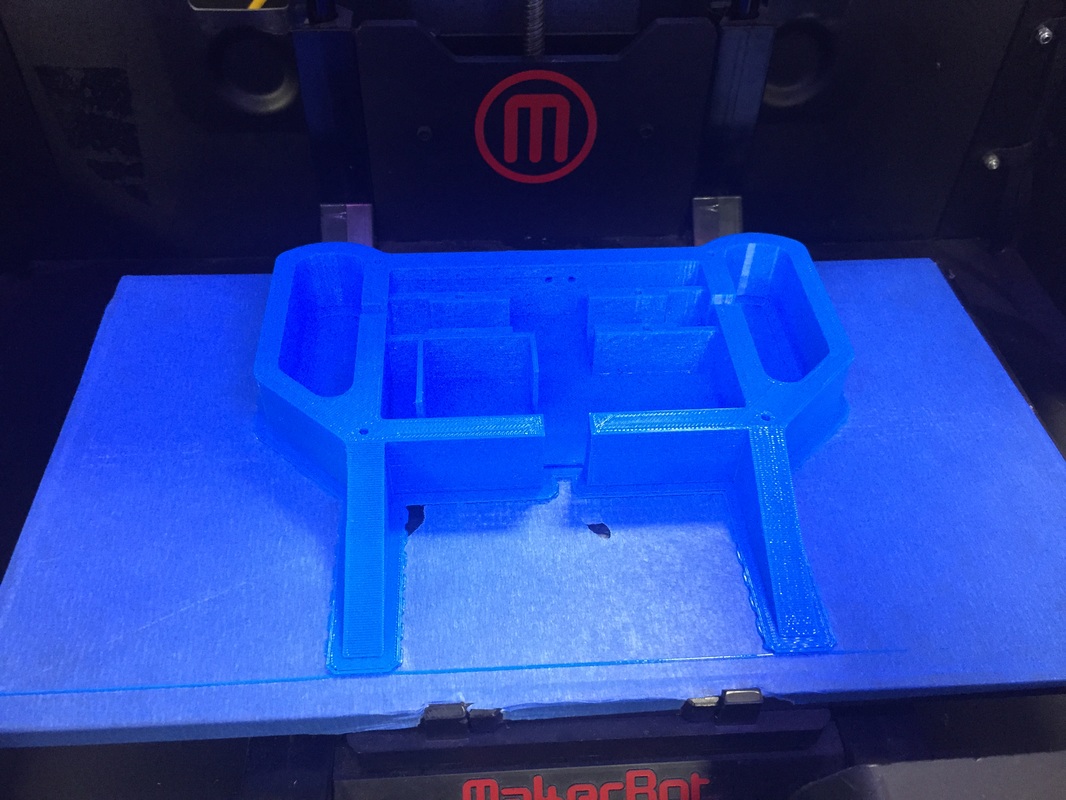
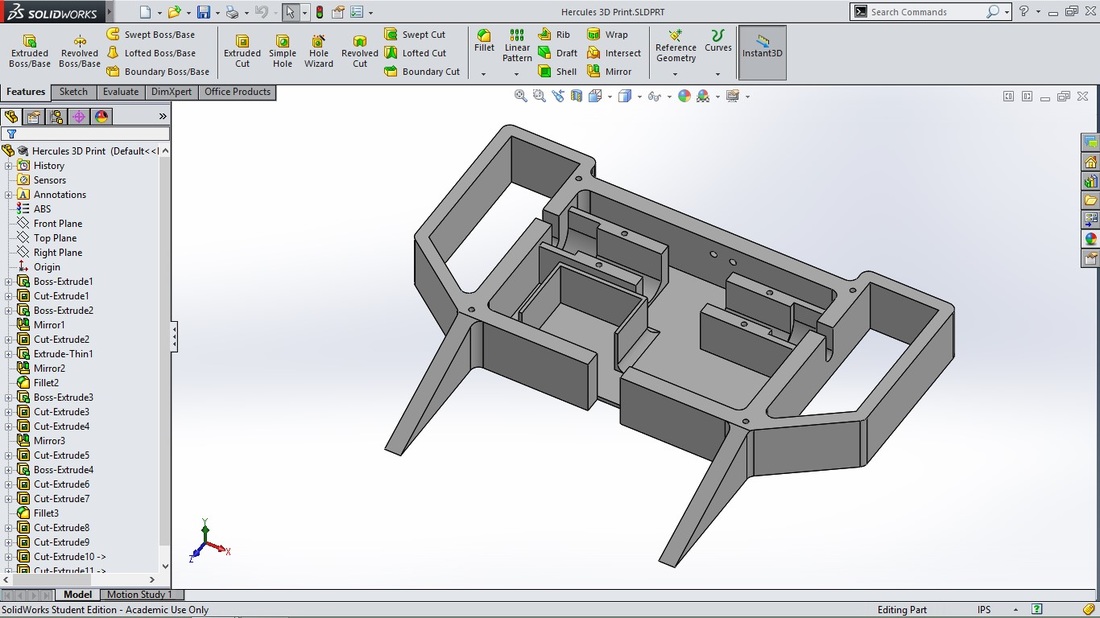
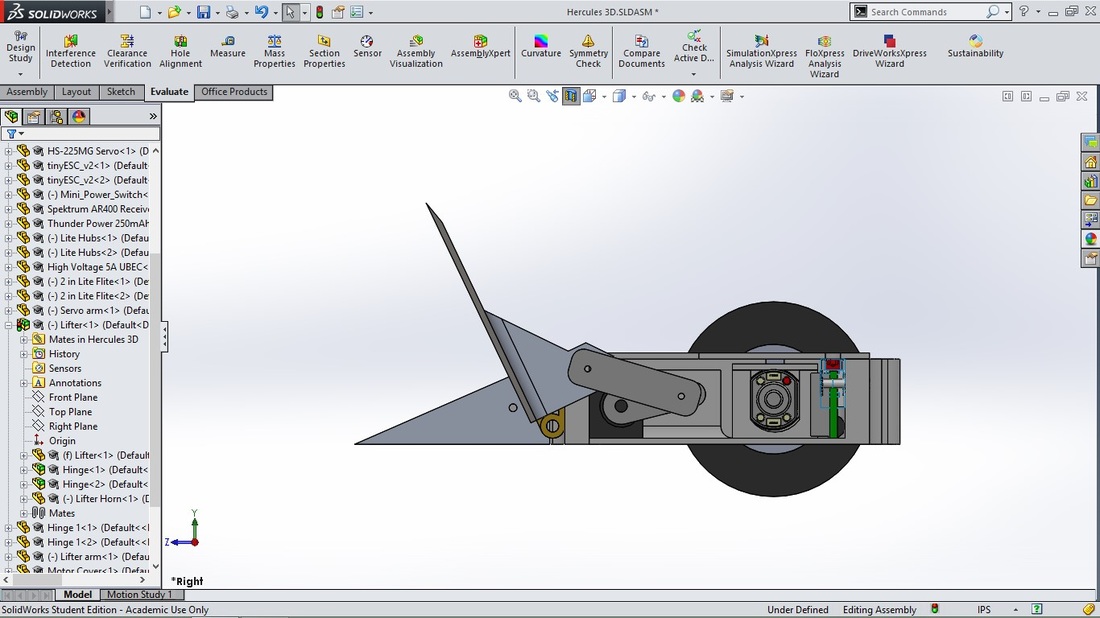
In preparation for Franklin Institute I have been working for the past few weeks on Hercules. Like I said in my last post, I decided to go a slightly different path with this version and 3D print the body. I have access to 3D printers at my University's maker space, Thinkbox. They recently upgraded and moved to a new 7 story building with floors of space to build whatever your imagination can conceive. I exported my Solidworks model into an stl to be able to print it out on the Makerbot. With an estimated print time of over 6 hrs I had plenty of time to study for my midterms. I had intended to go to a local competition near me (HORD), but between exams and other obligations I wasn't able to finish on time. Fortunately though, I had a four day weekend after midterms to relax (i.e. build robots). Because the University was on break, Thinkbox was closed, so I set up shop in my dorm room and got to work. Everything went pretty smoothly due to good planning and the fact that the majority of the internal parts were the same (the motors were switched from 30:1 GoldSparks to 11:1 SilverSparks and the servo was exchanged for a smaller metal gear servo). Overall I'm very happy with how this came out. Hopefully the 3D printed material holds up to the stiff competition at Franklin Institue I went back and thickened all of the walls on the Hercules drawing. It looks good but is still only .91 lbs according to Solidworks, so better, but not perfect. I also decreased the wheel diameter and went with a lower gearing on the Silver Sparks (2.25 -> 1.75 in wheels and 22:1 -> 11:.1 gear ratio). This should better protect the wheels while giving it a little more zip. I think that I will leave the design as is for now, the extra weight allowance will just be a cushion to ensure that it's under 1lb with all the screws and everything, because as anyone who has ever designed and built something using CAD will tell you, it's never perfect. If I build it and it turns out to still be underweight I'm considering adding steel sheets to the outside to provide a little more durability, or maybe a sacrificial wedge that can be put on for some of the nasty ant weight spinners like DDT. I hope to have this design built and ready for HORD on Oct. 17, but there's a problem with the 3D printing. My University is doing some remodeling so I won't have access to the 3D printers until Oct 1, which is cutting it close. But worst case scenario I hope to be able to at least bring Hercules, and hopefully Barrel Roll, to Franklin Institute on Oct. 24. 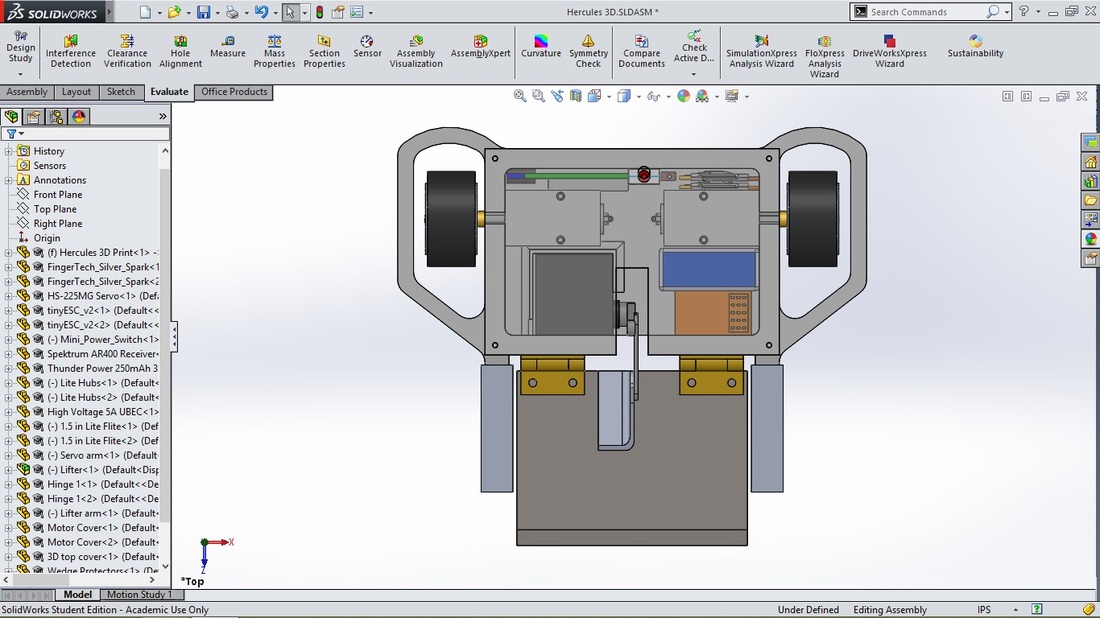 I've been away from combat robots for a while. I had a internship over the summer that left me with no time to vacation (i.e. go to events). But, with the return of Battlebots, the surge of discussion about robot combat has gotten to me and I decided to do what I can to get back into things. Since I couldn't actually compete, I turned to the next best thing, CAD. I went for a redesign of my most successful bot, Hercules, my ant-weight lifter. I had been bouncing around the idea of 3D printing a combat robot for a while and decided to go for it. The pictures below are my first try at it. The internals are all the same for the most part, the one difference being I opted to upgrade from the Gold to Silver Spark motors from Fingertech. The big difference now is the 3D printed body. The overall dimensions are roughly the same, but the body is now one solid piece. The motor mounts are designed specifically for the Silver Spark motors to slide in. Each motor is prevented from rotating due to the oblong shape and is clamped in by a lid that is kept in place by two screws. There is also a mount for the servo to slide into. That will be kept in place by servo tape and the 3D printed lid (not pictured) secured by 4 screws. I've been working on tweaking this design lately. The problem with the design pictured is weight. As shown, the bot would only weigh around 14 oz. Currently I'm working on beefing up all of the walls to make up for this, but feel free to comment on any ideas that you have on what to do with the extra weight. |
AuthorMy name is Michael Connerton. I'm a mechatronics engineer at a robotic automation startup company. This blog serves as a record of my exploits into the world of engineering, robotics and especially combat robotics. Archives
April 2023
Categories |











 RSS Feed
RSS Feed
