Over the past weekend I packed up my car and drove the 6+ hours from Cleveland to Philadelphia for the annual NERC Franklin Institute event. After having a summer of working and not being able to get away for robotics it felt good to be back.



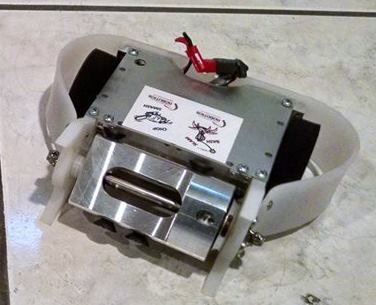
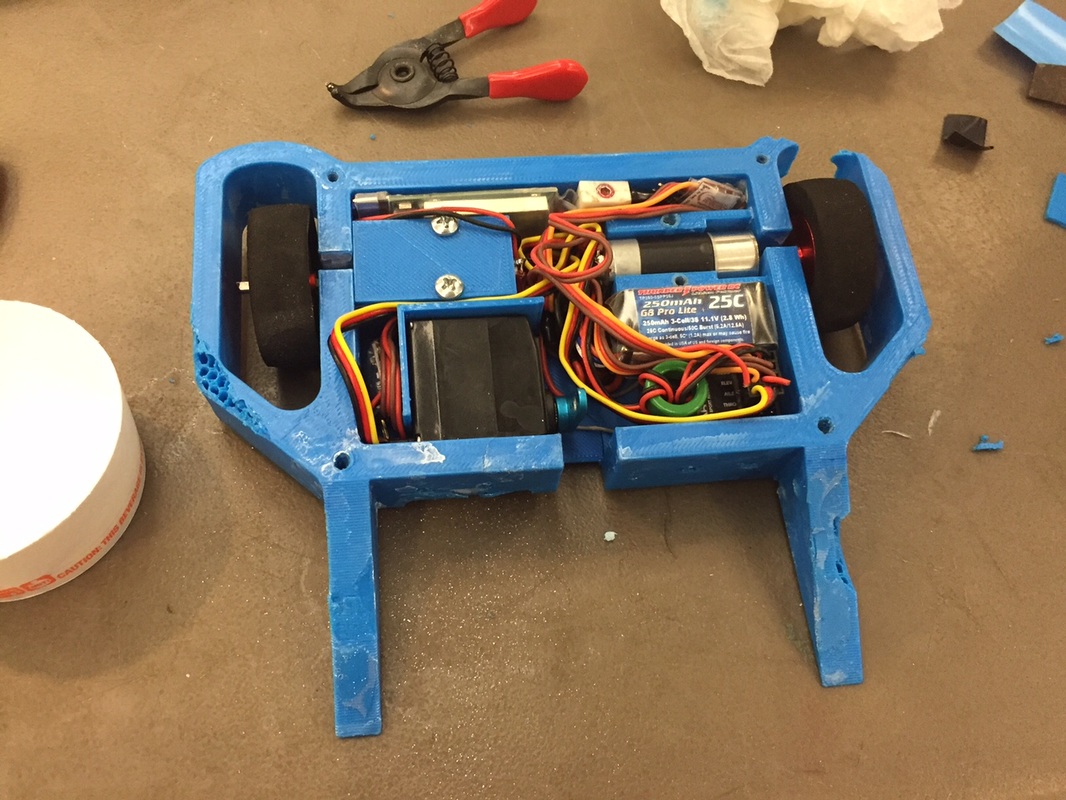
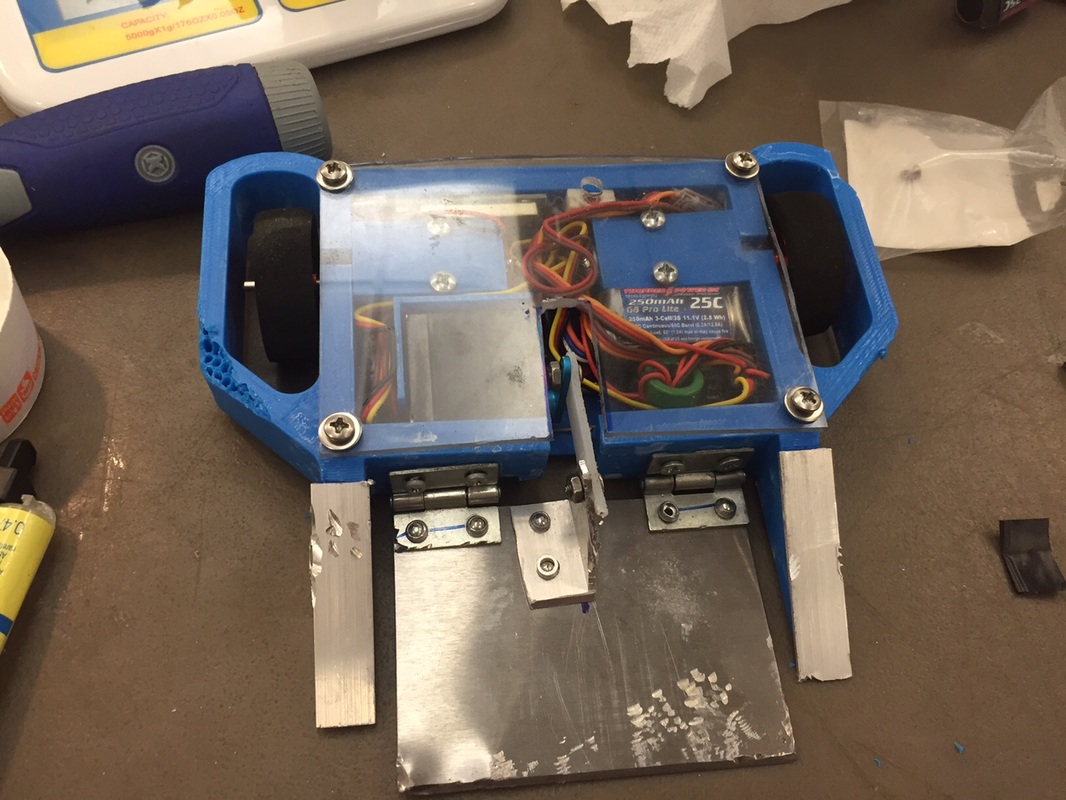
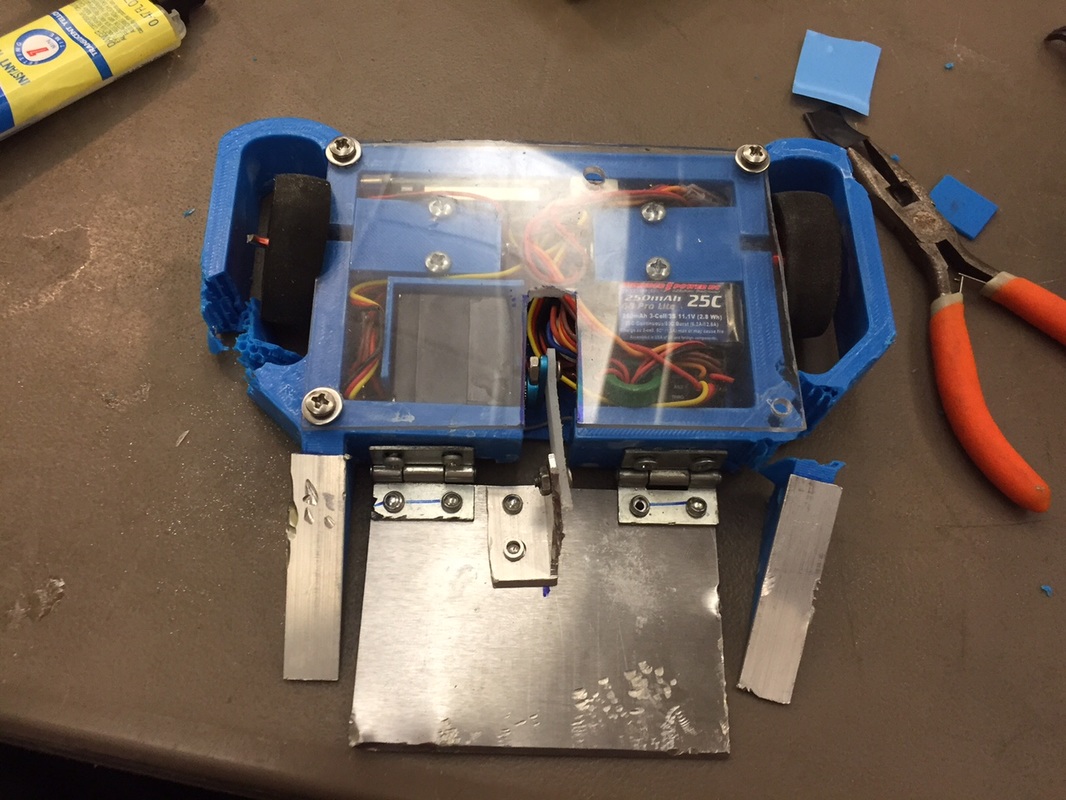
This time I only had enough free time between school and other activities to bring Hercules, my antweight lifter. I found out that Hercules was pretty underweight (only 13.7oz of the allowed 16oz) which was mostly due to the fact that I had to print the body in PLA instead of the ABS that I had originally wanted because ThinkBox didn't have their ABS 3D printers ready since they recently moved locations. Hercules being underweight really wasn't my main concern though. I worried that the PLA would be too brittle to stand up to the rigors of robot combat, and my worst fears were realized in my first fight.
Hercules vs. Revy
Revy was the newest in the line of Kitbots combat robotics kits, an antweight vertical spinning drum, built by Brandon Nichols of Team Headbangers. Hercules was to fight Revy as the first fight of the event. I knew that I was in for a tough match that would require perfect driving especially since I was worried about the brittleness of the frame.
The first half of the match went just as I had planned. I kept getting under Revy and besides from one big hit there really hadn't been that much damage done. That all changed when the lifting plate of Hercules got stuck under the wall of the arena, mostly because I hadn't had much practice driving Hercules seeing as I had finished it 2 days before and it was much faster and harder to control than previous versions. Revy was able to get a good pop in to flip over Hercules. Hercules was reduced to a bad wedgebot and could do little to attack Revy. The match ended with Revy hitting Hercules clear out of the arena.

Revy had done some decent damage to Hercules, especially that last hit. But with a little acetone and super glue I managed to get it back to its original state (kinda). Hercules would drop to the losers bracket to fight another day.
Hercules vs Whack Job
Whack Job was a hammerbot that had suffered a pretty serious beating in its previous fight and had to forfeit its match against Hercules. Although its not technically a win I'm counting it as a win because I think that even if they were able to fight it out Hercules would've come out on top.
Hercules vs Saifu
For its next fight, Hercules was to face Saifu, the original antweight drumbot that the Kitbots kits are based off of. That's right, I basically had to fight the same robot that I had lost to in the first round again, this time with a better driver. Oh well, that's how the tournament goes sometimes.

Although I can't find a video of it, this fight went about the same as the first. Hercules was a little beat up from its first fight so pieces started flying off sooner. Saifu was able to completely tear off the right wheel guard of Hercules and deal a killing blow to that tire, knocking Hercules out of the tournament.
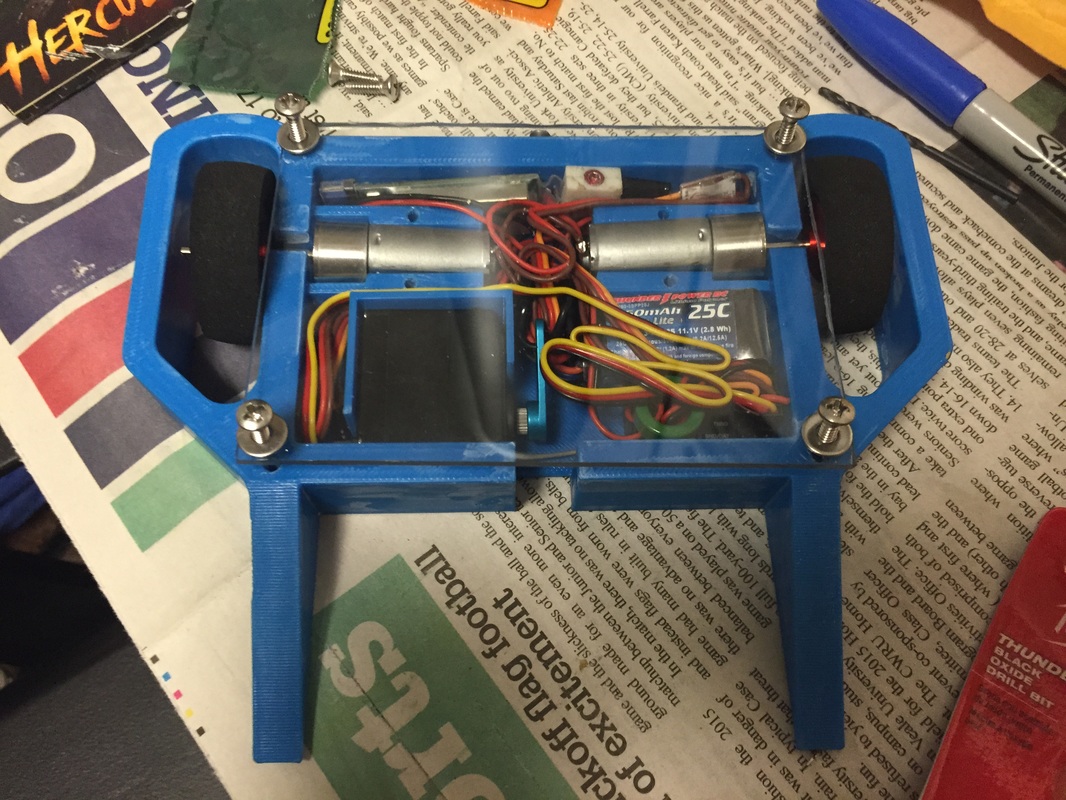
Overall, even though Hercules didn't do as well as I had hoped (1-2 on the day) I was happy. I think that if I can print the next frame of Hercules out of ABS it'll be much stronger and less brittle. I loved the new 11:1 Silver Spark motors from Fingertech and how Hercules was much faster and more maneuverable. I think with some slight modifications to the next version Hercules has the potential to be great.



 RSS Feed
RSS Feed
